Nowadays, image analysis and object
detection on images play a key role in many fields, including industry,
robotics, and medical diagnosis [1-3]. The use of digital technologies is
considered one of the approaches that can help improve the quality of
healthcare services and the experience of patients, physicians, and other
service recipients [4]. Among e-health services, telemedicine [5] and mobile
health based services are becoming increasingly popular. In 2016, IBM
researchers estimated that 90% of all medical data were images [6].
Accordingly, a huge number of methods have been developed to analyze medical
images, which are well described in the literature [7].
Methods of analyzing medical data using
machine learning algorithms are becoming widespread [8]. In particular, they
are used to solve the problems of classifying the types of brain and lung
lesions and making a diagnosis [9 -11]. However, machine learning algorithms
are often developed and tested on high-quality data, such as MRI and CT images,
presented as 3D or 4D images with low noise and high spatial resolution. At the
same time, visualization and analysis of such data are rather laborious and
also requires the use of specialized software that allows the user to upload
and then view data in specific formats (NIfTI,
DICOM). In real life, for quick information exchange about the condition of
patients, as well as for telemedicine consulting, medical specialists
frequently take photos of the computer screen on which the result of the MRI
scans is displayed. Telemedicine today is just beginning to gain popularity in
the Russian market. During the COVID-19 pandemic, the need for remote
transmission of medical data has emphasized the importance of developing
reliable algorithms to provide medical care at a distance [11]. One of the
major advantages of telemedicine is the saving of time and financial resources,
and allowing consultations with subspecialty physicians without them having to
move [12]. Also, when using telemedicine, patients have the opportunity to
remotely transmit data about their health status, including photos taken with a
smartphone camera. However, in this case, the quality of images deteriorates
and additional noise appears on them, which can lead to unstable operation of
standard methods of image analysis [13]. In addition, we note that the
developed algorithms should not be labor-intensive in computations in order to
be suitable for mobile use.
The purpose of the present study is to
compare the performance of different algorithms in the task of detecting brain
structures on MRI images taken by a smartphone from the monitor screen.
The criteria for comparison will be the accuracy of object detection in the
image, the amount of memory occupied by the model, and the number of elementary
operations carried out by the model.
In this paper,
we analyzed and compared four approaches to solving the problem of object
detection in an image: the morphometric approach [14], the Viola-Jones
algorithm [15, 16] and two neural network models: YOLOv8 [17] and
EfficientDet
[18]. The morphometric approach is one of the
common medical image preprocessing methods for machine learning [19], which
allows the user to find objects in an image using standard
OpenCV
library functions without using deep learning algorithms. However, it remains
unknown how robust this algorithm is when dealing with poor quality images. The
Viola-Jones algorithm is also a common and long-used method for automatic
object recognition [20,21], so it is particularly interesting to compare it
with the most popular modern deep learning algorithms such as YOLOv8 and
EfficientDet.
The above approaches were analyzed, taking
into account their advantages and limitations in the context of the task
presented.
A special set of
images was prepared for the training and testing of the considered algorithms.
The open clinical dataset BraTS-19 [22-24] was taken as a basis. This database
contains extensive routine clinical preoperative MRI images of glioblastoma and
brain glioma. Among the different imaging modalities presented in
NIfTI
(.nii)
file format, images recorded using FLAIR sequences were selected because they
are the most widely used in the context of malignant glioblastoma detection.
From the selected 3D images, several cross-sections were visualized, which were
then converted into PNG images using the
NiBabel
library [25] and photographed using the cameras of different smartphones
(Samsung Galaxy S10e, 12 MP; Samsung Galaxy A50, 25 MP; Redmi Note 10 pro, 108
MP). A total of 631 images were prepared. Examples of the resulting images are
presented in Fig.1.
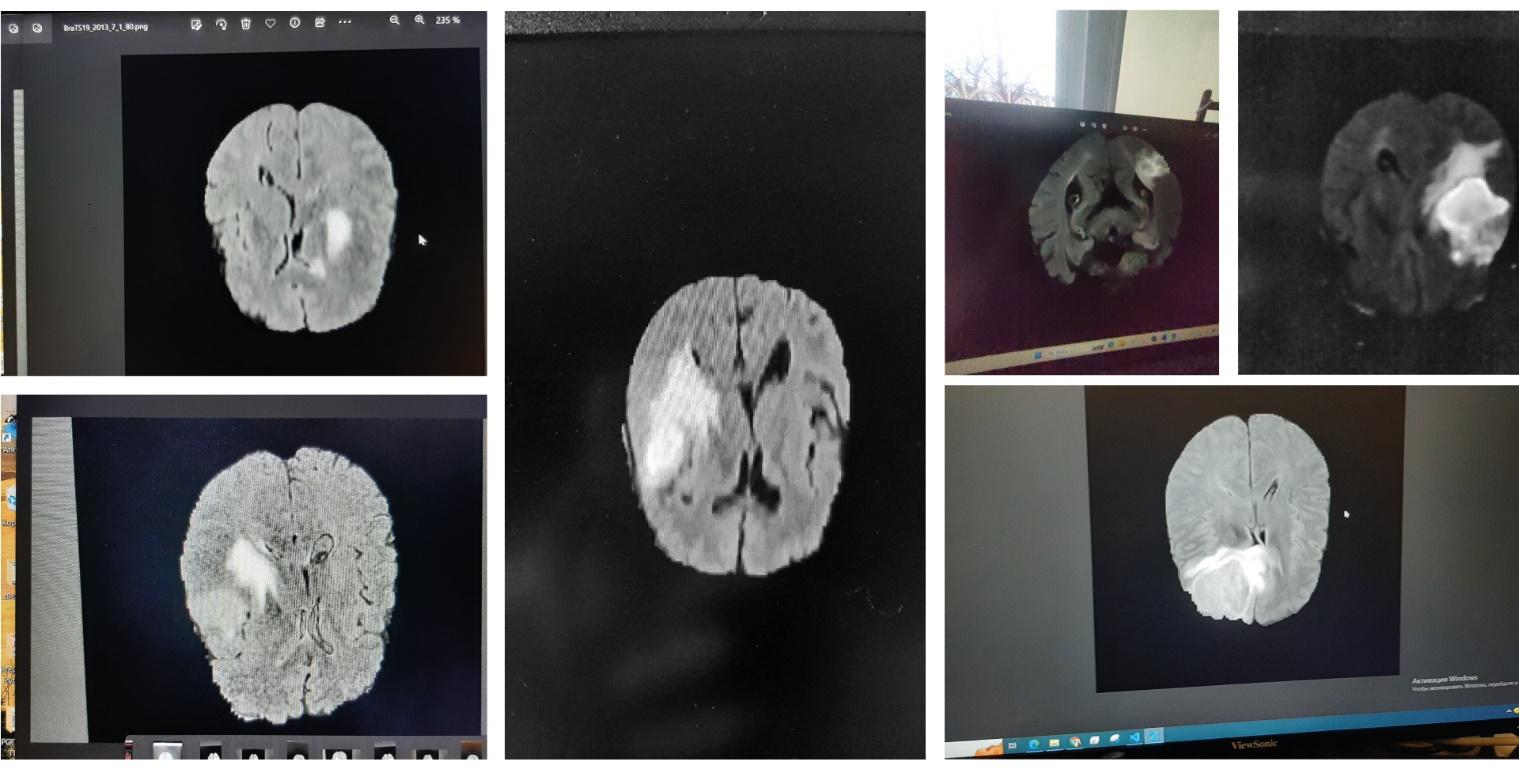
Fig. 1. Examples from the training set
It is worth
noting that the images may contain a variety of extraneous objects: desktop
icons, glare, reflections, and other noise — in order to simulate as
closely as
possible
the images that may occur during
real clinical practice. All images were then manually labeled by the authors
using the
Roboflow
tool [26].
We introduce the
concept of a bounding box, which is a rectangle containing the objects of
interest to the analytical model. The boundaries of such a box are defined by
two coordinates: upper left and lower right corners. Bounding boxes are widely
used in detection tasks due to a clear formalization of the description of the
object location in the image. This allows accurate detection of object
boundaries and the use of these frames in various tasks related to image
analysis.
Thus, the contours of the brain were surrounded by bounding boxes and
classified as the class “brains”, the other objects in the image were not
classified in any way. An example of a labeled image is shown in Fig. 2.
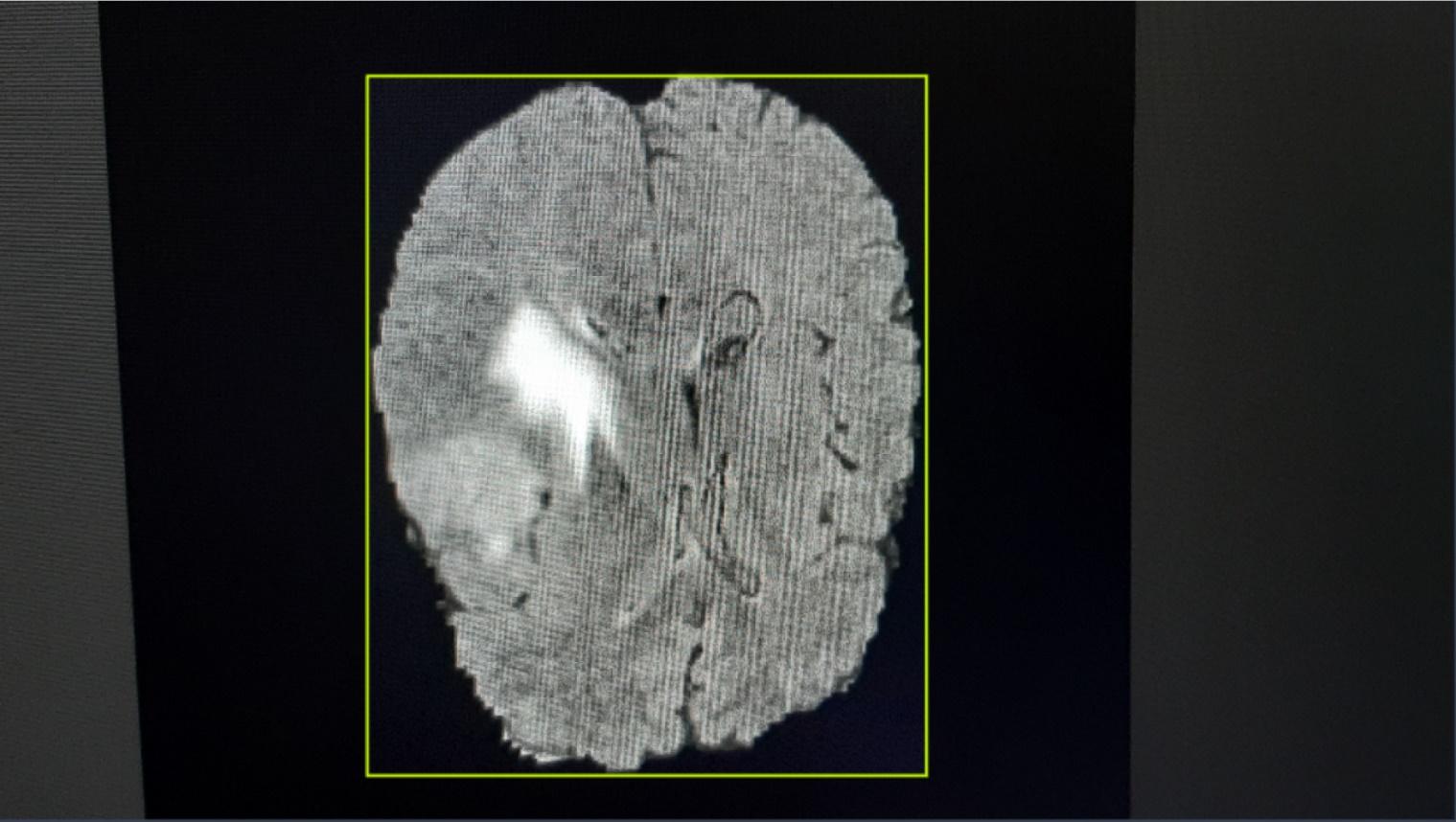
Fig. 2. Example of an annotated image
Since the
training efficiency of the neural network depends on the amount of data and
becomes more robust when noise is present in part of the training dataset [19],
image augmentation techniques, such as 90°
rotation,
adding points to the image, image blurring, specular reflection and perspective
distortion were used to broaden the sample. Examples of images with the listed
augmentations are presented in Fig. 3.
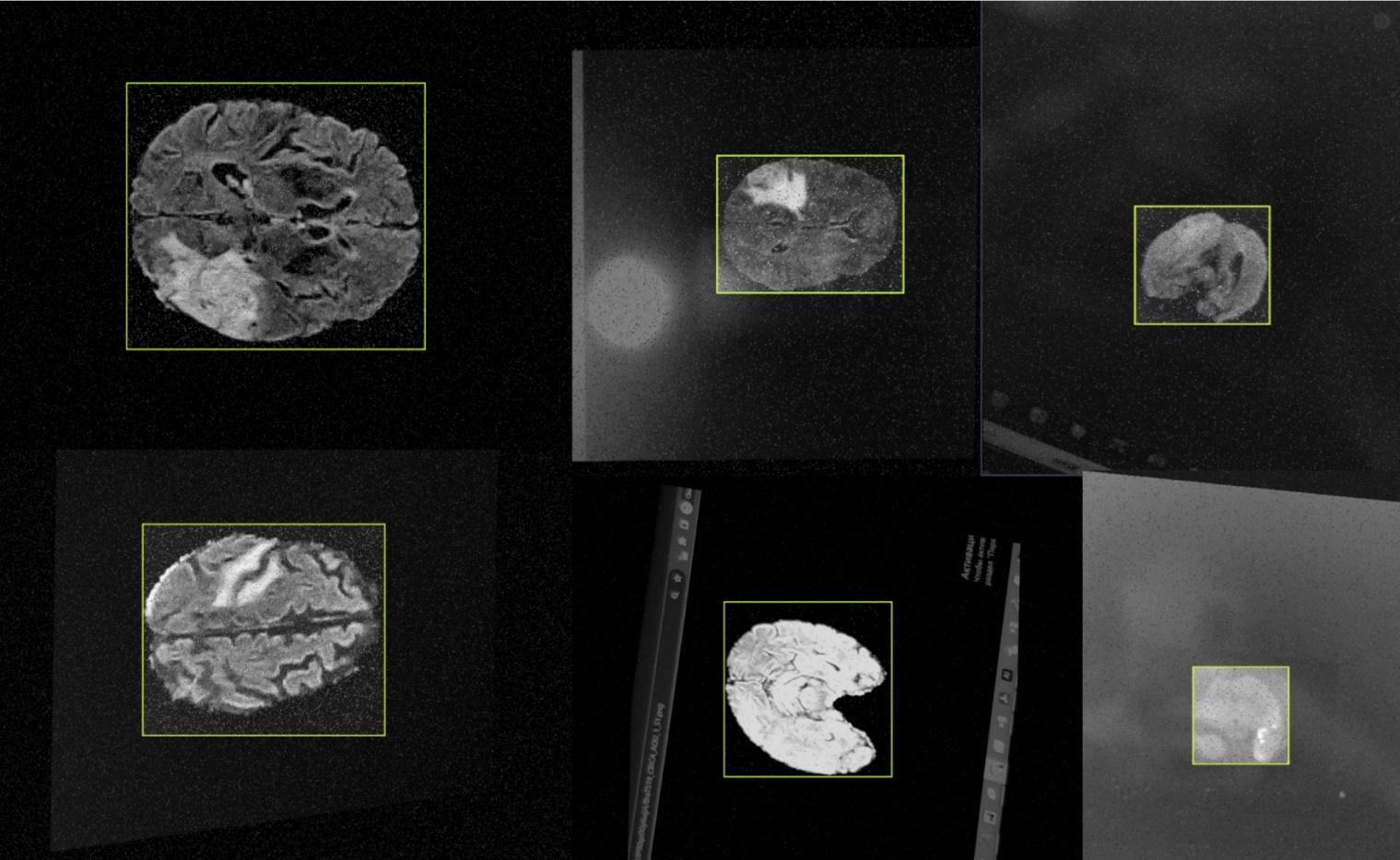
Fig. 3. Examples of augmented images
After augmentation, a set of 1038 images
was obtained. They were divided into training and test samples in the
proportion of 8:2. As a result, 814 images were included in the training sample
and 224 images in the test sample.
The study compares four approaches for
detecting objects in an image: the use of standard
OpenCV
library methods (such as applying morphological transformations to a
binarized
image), called the morphometric approach, the use
of the Viola-Jones algorithm, and two deep learning methods: neural networks
with the YOLOv8 architecture and with the
EfficientDet
architecture. Each of the four approaches is described in detail below.
A number of
works related to medical image processing [14, 27] use some functions from the
OpenCV
library to process an image or to prepare an image
for use in training a neural network.
OpenCV
(Open
Source Computer Vision Library) [28] is an open source library for working with
computer vision algorithms, machine learning and image processing. This library
is implemented in C/C++, but it is also developed for Python, Java,
Matlab
and other languages. In this paper, we used the
Python version of the library.
We created a
6-step algorithm to extract the outline of the largest object in the image and
draw a bounding box around it, based on the information described in the above
sources.
The initial
dataset contains images with one large object — the contour of the
brain and a background. In this case, the background of the image is black, but
in addition to it, other objects described above (desktop icons, screen frame,
etc.) may also be on the photo. The contours of the brain in the image must be
the largest contour. To find it, we propose to use the following algorithm:
1.
Convert an image to
grayscale.
2.
Apply
binarization
to the obtained image. To find the threshold of
binarization
we use Otsu's algorithm [29]. Thus, the pixels belonging to the lighter
region — the contour of the brain — should fall into the
“useful” class, while the rest fall into the “background” class.
3.
Apply the morphological
closing operation to a
binarized
image with a
3×3 kernel. This operation helps to eliminate small holes or dots in
objects and merge them.
4.
Find all external contours in
the transformed image [30]. After applying the previous operations, the main
object became absolutely white, and the background became black. In this case,
the contours will be understood as curves connecting continuous points (along
the boundary) having the same color and brightness, i.e., the objects with the
highest brightness in the image will be detected.
5.
Among the found contours,
choose the contour bounding the figure of maximum area. To do this, calculate
the areas of all found contours using the Green-
Ostrogradsky
formula:

where functions
 are determined in space D, restricted by a
certain curve C and have partial derivatives
are determined in space D, restricted by a
certain curve C and have partial derivatives
 .
.
6.
Draw a bounding box around
the identified contour.
This algorithm
gives us the coordinates of the rectangles, presumably bounding the brain in
the image.
The Viola-Jones
algorithm is one of the first object detection methods [20] that became widely
used. However, this method has recently been losing popularity due to the
emergence of new machine learning methods that demonstrate higher accuracy in
recognizing the original objects [21]. A significant advantage of the method is
that it demonstrates a low computational load on the system [31], which can be
very useful if it is used as part of a more complex image processing system.
This method is
based on an integral image representation, which can efficiently compute the
total brightness of pixels in rectangular regions of an image by applying
preprocessing [15,16]. This significantly reduces the computational complexity
of the operations and allows fast feature computation at different scales and
different object positions in the image.
The present
algorithm incorporates the adaptive boosting algorithm [20], which is a
learning method with successive tuning of weak classifiers (simple models that
do not have high prediction accuracy) based on the errors of the previous
classifier. In this way, the classification accuracy is gradually improved.
Combining a set of weak classifiers together with a specific weight for each of
them results in a stronger model. Typically, the weight for each weak
classifier is determined iteratively during the adaptive boosting training
process, where the weights are updated based on how well the model handles
certain data samples.
One of the key
components of the Viola-Jones algorithm, in addition to those listed above, is
the use of
Haar
features to find the object being
searched for.
Haar
features are rectangular regions
of different sizes such as horizontal, vertical and diagonal stripes. These
features are used to calculate various image features on the basis of which the
object will be classified. The combinations of features form the cascading structure
of the classifier. A visualization of the
Haar
features is shown in Fig. 4.
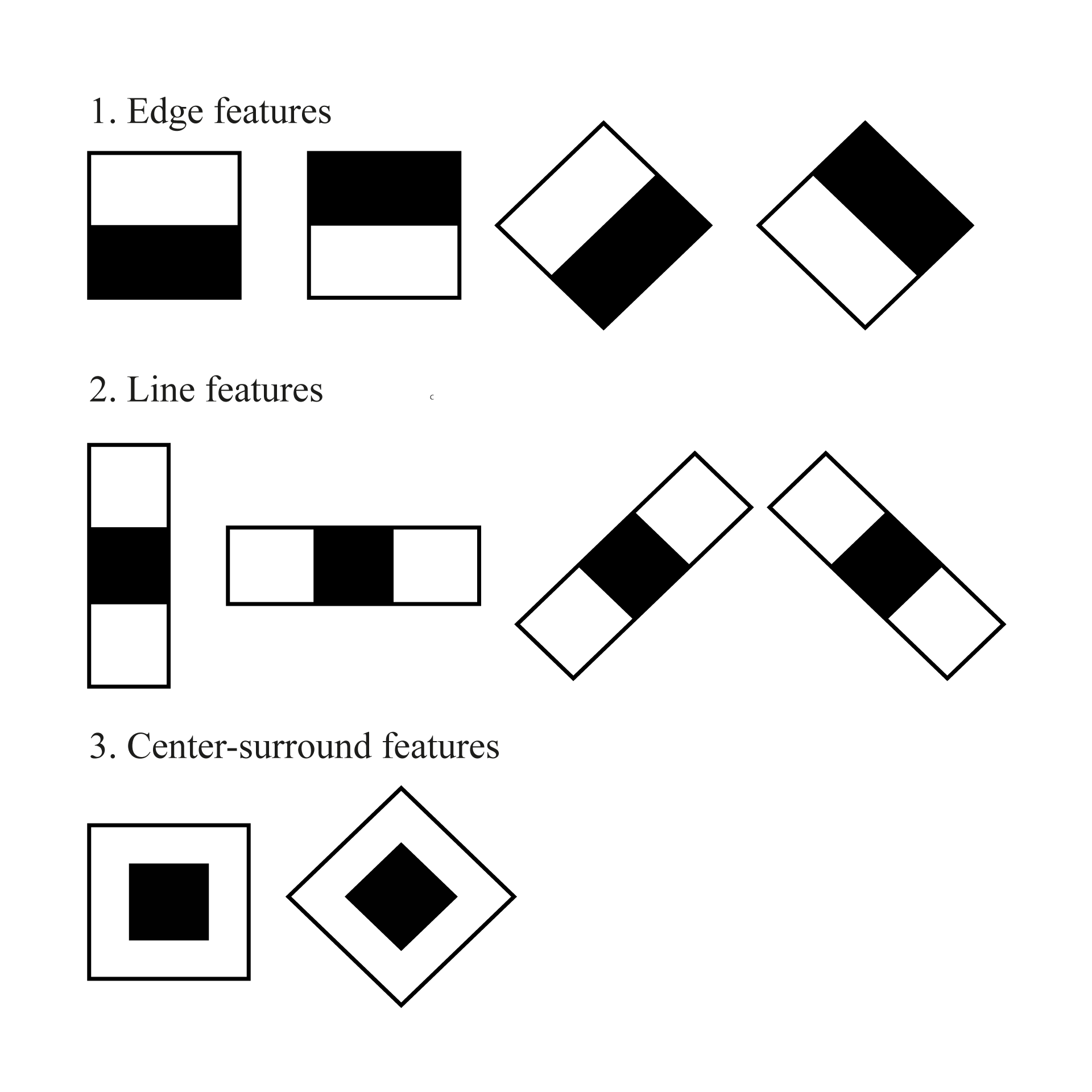
Fig. 4.
Haar
features
The overall
cascade structure obtained by the Viola-Jones method is called
Haar's
Cascade. The cascade is widely used to detect
objects such as faces, eyes, cars, etc. It is also capable of finding the
movements of the searched object in the video and tracking them.
Haar’s
Cascade is
the most commonly used of all the object recognition methods considered in this
paper. Nonetheless, a significant drawback of this algorithm is that it is
arduous on the quantity of images in the training sample owing to the
utilization of bouncing in training [17]. It is also arduous on the brightness
of the images due to the utilization of a brightness-aware method in the
training algorithm.
In this work,
814 positive images (407 original + 407 augmented) containing an object of the
class “brains” and 1,000 negative images without objects of the desired class
were used in training the cascade. Negative images included snapshots of
desktop screens, mouse cursors, etc. — in order to reduce the
sensitivity of the cascade response to the presence of these objects in the
positive sample, as well as images of irrelevant objects: animals, fruits,
vegetables, and nuts (Fig. 5).

Fig.5. Some images from negative sampling
In this study, a
cascade was created using the Cascade Trainer GUI program, which is a graphical
interface for applying algorithms from the
OpenCV
library.
The cascade was
trained for 20 epochs, after which a required false alarm rate of the
classifier of 10% was achieved. At the same time, the acceptance ratio of the classifier
was 0.0002, which means that the classifier is accurate enough and the model
has not yet been
overtrained.
Thus, the creation of
the cascade took 1,442 minutes. Training was performed on an AMD Ryzen 5
processor, 4 performance cores, frequency 2.10 GHz.
YOLO (You Only
Look Once) is a family of models for solving the multi-class detection problem.
YOLO models are widely used for object detection in medical image processing
[32]. The multi-class detection task in deep learning is conventionally
composed of two subtasks. The first one is finding candidate bounding boxes,
i.e., such bounding boxes in the image, within which at least one of the
searched objects is most likely to be located. The second task is to classify
the identified candidate bounding boxes by selecting the class with the highest
calculated probability of being located within a given bounding box.
Earlier
architectures, such as R-CNN [33], Fast R-CNN [34] or Faster R-CNN [35] solved
the above tasks in two separate steps, whereas YOLO solves both tasks in a
single step, which is reflected in the name of the method.
The basic
version of the YOLO model [17] is a convolutional neural network architecture
from the “Darknet” family [36] and two fully
connected layers. The basic version of YOLO uses the “Darknet-17” architecture.
Note that “Darknet” in this case refers to the
architecture and not to a deep learning framework with a similar name.
YOLO inputs an
image and outputs vectors for each of the remaining bounding boxes after a
“Non-maximum suppression” procedure, which leaves the most relevant one out of
several very similar bounding boxes, excluding the rest from the final
detection.
Since 2015, the
YOLO family has seen various “newcomers” [32]. The most recent of these at the
time of writing is the eighth version of YOLO, namely YOLOv8. In this model,
object detection checkpoints are pre-trained on the MS-COCO dataset [37], and
image classification models are pre-trained on the ImageNet set [38], allowing
for a more stable multi-class detection quality.
Ultralytics
[39],
the official library of YOLOv8 developers, was used to run the model. The
pre-trained model was further trained on a dataset created by the authors using
stochastic gradient descent (AdamW
algorithm with a
learning rate equal to 0.002 and momentum equal to 0.9) with the selection of
hyperparameters
after each epoch on a validation sample of
100 images. Data for the validation sample were randomly selected from the training
sample. The model was trained for 50 epochs, after which the value of the error
function stopped decreasing and there was a danger of over-fitting. The process
of changing the value of the loss function during 50 epochs is illustrated in
Fig. 6.
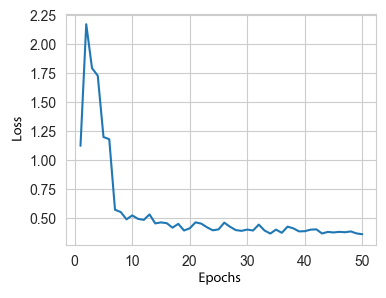
Fig. 6. Graph of convergence of training results
of the YOLOv8 model
A threshold
value of 0.7 was placed on the probability of finding an object of the class
“brains”. The value was selected as a
hyperparameter
in order to achieve the highest average Intersection over Union (IoU) metric.
YOLOv8 was
trained in the Google
Colaboratory
interactive
environment using a T4 GPU, with a training time of 25 minutes.
EfficientDet
(D0-D7)
[18] are models from the innovative class of neural network models
EfficientNet
[40], designed for object detection in images.
This model is based on the
EfficientNet
architecture,
on top of which a layer working with the Bidirectional Feature Pyramid Network
(BiFPN)
is added, followed by a classifier network
for generating object class predictions and a block network for bounding box
prediction. Focusing on mobile and embedded applications,
TensorFlow
Lite (TF Lite) [41] developed the
EfficientDet-lite family
of object detection models using convolutional architectures standard to this
family of models, but formatted for small model size and fast output. However,
their performance is slightly inferior to the original
EfficientDet
family counterpart. This study used the
EfficientDet-lite
(lite0) object detection model pre-trained on the MS-COCO 2017 dataset [37].
Based on the results of the model's comparison, the authors plan to integrate
the selected approach into a large automatic diagnosis system. Therefore, the
speed of operation and the small size of the model interested us from a
research perspective, and this model was chosen. The number of output classes
of the model was changed (the MS-COCO 2017 dataset contains 91 classes of
objects, and in the task at hand, the model should detect only one class -
“brains”), and the threshold value of the probability of detecting an object in
an image was set to 0.7, similar to the YOLOv8 model described above. This was
done for correctness of comparison of the final results. The model was
pre-trained using the error back propagation method using a stochastic gradient
descent with an inertia of 0.9, an initial step of 2*10^-2, and a cosine
attenuation multiplier of 4*10e-5. The model was pre-trained for 20 epochs,
after which the loss function stopped decreasing. This process is illustrated
in Fig. 7.
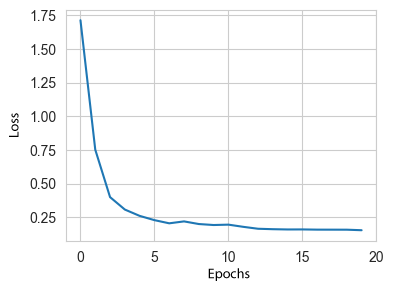
Fig. 7. Graph of convergence of training results
of
EfficientDet-lite (lite0) model
The model was
trained on a PC with an AMD Ryzen 3 processor, 4 performance cores, frequency
2.6 GHz. The training took 162 minutes on the described computer.
For object
detection tasks in an image, the choice of a quality metric that indicates how
well the model solves the problem is also important. The
IoU
metric is widely used to evaluate the quality of model performance in
segmentation and object detection tasks in computer vision.
IoU
has a simple and interpretable formula that reflects the ratio between the area
of the intersection region of the rectangles bounding the true and predicted
objects and their total area (Fig.8).
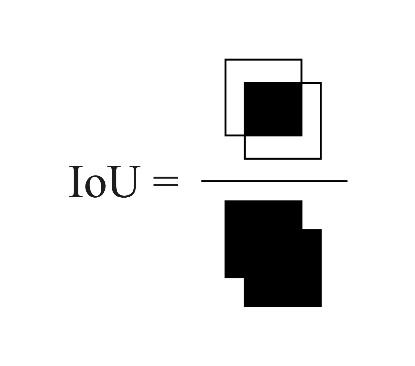
Fig. 8. Graphic interpretation of the
IoU-metric
In this case, it
is easy to interpret how well the model detects objects. To compare the
performance of different methods, the average value of this metric on the test
sample was calculated. In Section 4, Table 1 shows not only the mean values of
the metric, but also the maximum and minimum over the sample, in column 2.
Since, in this study, only one class of objects is searched for in the image
and the result is a single bounding box, the use of this metric is more
appropriate than using common metrics such as average precision (AP) and mean
average precision (mAP).
In addition to
the
IoU
metric, the number of elementary operations
that were required to run the algorithms on the test sample was measured as a
measure of algorithm performance. This metric is independent of the device on
which the model is run. A standard python language module,
cProfile,
was used to analyze program performance and calculate the number of elementary
operations.
The results of
the computational experiments are described in Table 1.
Table 1
Comparison of algorithms
|
Name of the approach
|
IoU
(min; max)
|
Number of elementary operations
|
Size of the model (Mb)
|
|
Morphometric approach
|
0.795 (0.0; 0.99)
|
98,710
|
-
|
|
Viola-Jones algorithm
|
0.453 (0.0; 0.85)
|
97,366
|
0.11
|
|
YOLOv8
|
0.913 (0.0; 0.99)
|
68,900
|
22.49
|
|
EfficientDet-lite0
|
0.817 (0.04; 0.94)
|
197,823
|
4.23
|
The YOLOv8 model
demonstrated the best average quality of object detection on the test sample.
However, it was found that the performance of all considered models strongly
depended on the presence of noise in the image. For a more detailed analysis of
the algorithms' performance quality, histograms of the distribution of the
object detection quality on the image were plotted (Fig.9).
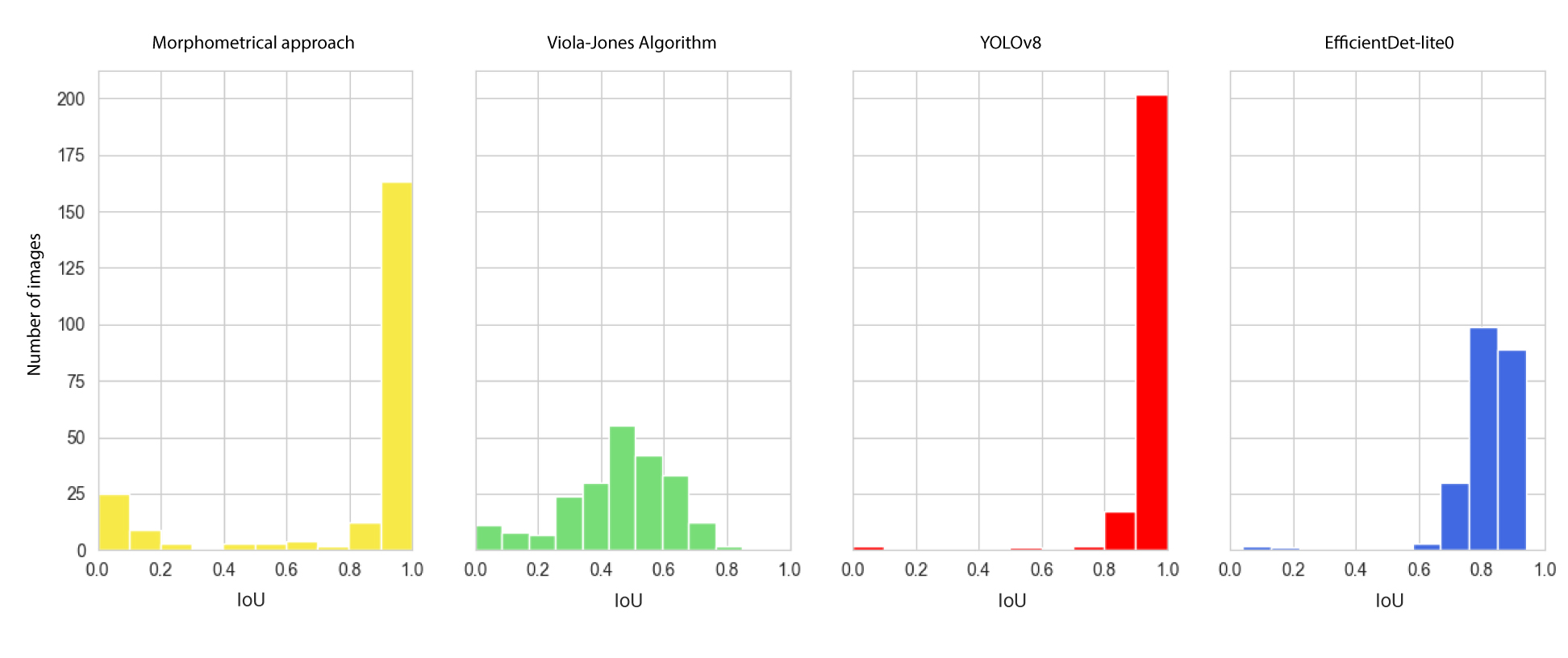
Fig. 9. Histograms of the distribution of
IoUs'
values based on the results of object detection
provided by different models
For example, for
images with little noise and sufficient contrast between the object (brain) and
the background, the morphometric algorithm detected the object with an accuracy
of up to 99.9%. However, the presence of strong noise in the image reduced its
accuracy to almost 0%. It can be concluded that this algorithm processed most
of the images with very high accuracy. Machine learning algorithms proved to be
more resistant to image noise and demonstrated stable results for almost the
entire sample. Nevertheless, the factor of noise presence was significant for
them as well. The
IoU
distribution for the YOLOv8
model was the most skewed to the right, i.e., YOLOv8 almost always shows a
score of 0.8 or higher, except for one photo (Fig. 8) when the model is unable
to find an object. In this image, a strong noise is created by the flash from
the camera, which obviously biases the model. The
EfficientDet
model successfully detected brain contours in all images, even in the presence
of strong noise. However, the average quality of object detection in the image
of this model is worse compared to YOLOv8, which is due to the lower accuracy
of finding the bounding box. The Viola-Jones algorithm on the presented sample
showed the worst result in terms of
IoU
-metrics, but
we can note a certain stability in its work: it can detect the brain on images
of any quality.
Fig.8 shows
examples of algorithm results on good quality images and on images with a lot
of noise.
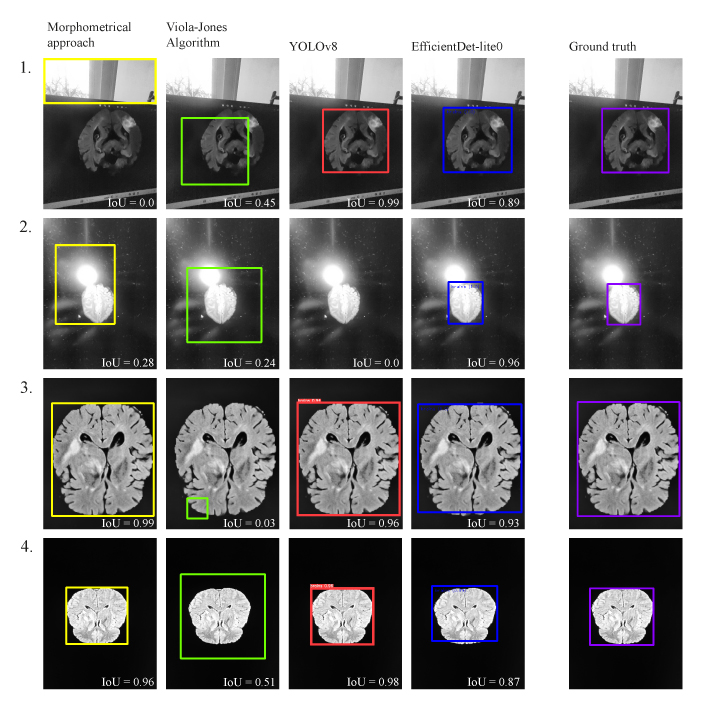
Fig. 10. Results of algorithms' work on images
with different noise levels. 1, 2: highly noisy images, 3,
4: high-quality images
The study also
revealed that the Viola-Jones algorithm is the least costly in terms of the
number of operations, and it occupies the least memory space. The morphometric
approach is also very close to Viola-Jones in those parameters. However, there
are serious obstacles for using both of these methods: in the case of the
Viola-Jones algorithm: very low accuracy, and in the case of morphometric
approach — instability of the algorithm in the presence of strong noises in the
image.
In this paper,
four methods of brain detection in a computer screen MRI image have been
compared. All tested approaches demonstrate a quite high average performance of
object detection in the image. The YOLOv8 model demonstrated the highest
average
IoU
object detection performance, however,
this model is massive in terms of computer memory and its performance is
sensitive to noise in the image. The EfficientDet-lite0 model demonstrated a
slightly lower quality of object recognition on average, but proved to be more
robust to noise. Another advantage of this model is its light weight. The
volume of the model is important for its further incorporation in more complex
neural network diagnostic systems, for which object detection will be only the
first step. The classical morphometric approach to the detection of a large
object in the image has also demonstrated high results, but it cannot be used
to solve the problem because this algorithm recognizes the largest light area
in the image. In the case of image illumination or a random light object in the
frame, it works incorrectly. The Viola-Jones algorithm poorly coped with the
task of detecting brain structures on the MRI image and is not recommended for
use within the described task.
The study was
supported by the Academic Fund Program at HSE University (grant No 23-00-026
“Development of automatic approaches to determine the etiology of cryptogenic
stroke for the purpose of preventing secondary acute cerebrovascular
accidents”).
The authors
would like to thank Sofia
Petrovna
Kulikova,
Head of the Center for Cognitive Neuroscience,
National Research University Higher School of Economics, Perm, for her help in
preparing the article.
1.
Song S. et al.
EfficientDet
for fabric defect detection based on edge
computing //Journal of Engineered Fibers and Fabrics, Vol. 16, 2021
(https://doi.org/10.1177/15589250211008346).
2.
Afif
M. et al. An evaluation of
EfficientDet
for object detection used for indoor
robots
assistance navigation //Journal of Real-Time Image
Processing, Vol. 19 (3), 2022, pp. 651-661
(http://dx.doi.org/10.1007/s11554-022-01212-4).
3.
Mercaldo
F.
et al.
Object
Detection for Brain Cancer Detection and Localization //Applied Sciences, Vol.
13 (16), 2023, pp. 9158 (http://dx.doi.org/10.3390/app13169158).
4.
Moghaddasi
H. et al., E-health: a global approach
with extensive semantic variation //Journal of medical systems, Vol. 36, 2012,
pp. 3173-3176 (http://dx.doi.org/10.1007/s10916-011-9805-z).
5.
Pol P., Deshpande A.M.
Telemedicine mobile system //2016 Conference on Advances in Signal Processing
(CASP), IEEE, 2016, pp. 484-487 (http://dx.doi.org/10.1109/CASP.2016.7746220).
6.
Landi
H. IBM Unveils Watson-Powered Imaging
Solutions at RSNA,
тRSNA,
2016. Accessed: November,
29st, 2023. [Online]. Available:
https://www.hcinnovationgroup.com/populationhealth-management/news/13027814/ibm-unveilswatsonpowered-imaging-solutions-at-rsna
7.
Недзьведь
А.М.,
Абламейко
С. В. Анализ изображений для решения задач медицинской диагностики,
Минск :
ОИПИ НАН Беларуси, 2012, С.240 (ISBN
978-985-6744-75-7).
8.
Papp L.
et
al.
Personalizing medicine through hybrid imaging and medical big data
analysis //Frontiers in Physics, Vol. 6, 2018, pp. 51
(http://dx.doi.org/10.3389/fphy.2018.00051).
9.
Kumar S.,
Pilania
U.,
Nandal
N. A systematic study of artificial
intelligence-based methods for detecting brain tumors //
Информатика
и
автоматизация,
Vol. 22 (3), 2023, pp. 541-575
(http://dx.doi.org/10.15622/ia.22.3.3).
10.
Krishnapriya
S.,
Karuna
Y.
Pre-trained deep learning models for brain MRI image classification //Frontiers
in Human Neuroscience, Vol. 17, 2023, pp. 1150120 (http://dx.doi.org/10.3389/fnhum.2023.1150120).
11.
Moreira L.P. Automated
Medical Device Display Reading Using Deep Learning Object Detection //
arXiv
preprint arXiv:2210.01325, 2022
(https://doi.org/10.48550/arXiv.2210.01325).
12.
Козлова А. С.,
Тараскин
Д. С. Тенденции
развития телемедицины и ее влияние на страховой рынок России //Промышленность:
экономика, управление, технологии, 2018, Т.2 (71), С.144-148.
13.
Mabotuwana
T.
et al.
Detecting technical image quality in radiology reports //AMIA Annual Symposium
Proceedings, American Medical Informatics Association, Vol. 2018, 2018, pp.
780.
14.
Widodo C.E.,
Adi
K.,
Gernowo
R. Medical image
processing using python and open cv //Journal of Physics: Conference Series,
IOP Publishing, Vol. 1524 (1), 2020, pp. 012003
(http://dx.doi.org/10.1088/1742-6596/1524/1/012003).
15.
Viola P., Jones M.J. Robust
real-time face detection //International journal of computer vision, Vol. 57,
2004, pp. 137-154 (https://doi.org/10.1023/B:VISI.0000013087.49260.fb).
16.
Freund Y.,
Schapire
R., Abe N. A short introduction to boosting
//Journal-Japanese Society
For
Artificial
Intelligence, Vol. 14(771-780), 1999, pp. 1612
(https://doi.org/10.4236/jamp.2021.911186).
17.
Redmon
J. et al. You only look once: Unified,
real-time object detection //Proceedings of the IEEE conference on computer
vision and pattern recognition, 2016, pp. 779-788
(http://dx.doi.org/10.1109/CVPR.2016.91).
18.
Tan M., Pang R., Le Q.V.
Efficientdet:
Scalable and efficient object detection
//Proceedings of the IEEE/CVF conference on computer vision and pattern
recognition, 2020, pp. 10781-10790
(http://dx.doi.org/10.1109/CVPR42600.2020.01079).
19.
Z. et al. Improving synthetic
CT accuracy by combining the benefits of multiple normalized preprocesses //Journal
of Applied Clinical Medical Physics, 2023, pp. e14004
(http://dx.doi.org/10.1002/acm2.14004).
20.
Viola P., Jones M. Rapid object detection
using a boosted cascade of simple features //Proceedings of the 2001 IEEE
computer society conference on computer vision and pattern recognition. CVPR
2001, IEEE, Vol. 1 2001, pp. I-I (http://dx.doi.org/10.1109/CVPR.2001.990517).
21.
Sanjay T.,
Priya
W.D. Criminal Identification System to Improve
Accuracy of Face Recognition using Innovative CNN in Comparison with HAAR
Cascade //Journal of Pharmaceutical Negative Results, 2022, pp. 218-223.
22.
Menze
B. H. et al. The multimodal brain tumor
image segmentation benchmark (BRATS) //IEEE transactions on medical imaging,
Vol. 34 (10), 2014, pp. 1993-2024 (http://dx.doi.org/10.1109/TMI.2014.2377694).
23.
Bakas
S.
et al.
Advancing the cancer genome atlas glioma MRI collections with expert
segmentation labels and
radiomic
features
//Scientific data, Vol. 4 (1), 2017, pp. 1-13
(https://doi.org/10.1038/sdata.2017.117).
24.
Bakas
S.
et al.
Identifying the best machine learning algorithms for brain tumor segmentation,
progression assessment, and overall survival prediction in the BRATS challenge
//
arXiv
preprint arXiv:1811.02629, 2018
(https://doi.org/10.48550/arXiv.1811.02629).
25.
Brett M. et al.
Nipy/
nibabel:.
4.0.0,
Zenodo,
17.06.2022,
(http://doi.org/10.5281/zenodo.6658382).
26.
Dwyer B. et al.
Roboflow
(version
1.0)[software]. 2022. Accessed:
November, 29st, 2023. [Online]. Available: https://roboflow.com.
27.
Yousif
M.J. Enhancing The Accuracy of Image
Classification Using Deep Learning and Preprocessing Methods //Artificial
Intelligence & Robotics Development Journal, 2023
(http://dx.doi.org/10.52098/airdj.2023348).
28.
Bradski
G. et al.
OpenCV
//Dr. Dobb’s journal of software tools, Vol. 3 (2), 2000.
29.
Otsu N. A threshold selection
method from gray-level histograms //IEEE transactions on systems, man, and
cybernetics, Vol. 9 (1), 1979, pp. 62-66 (https://doi.org/10.1109/TSMC.1979.4310076).
30.
Suzuki S.
et al.
Topological structural analysis of digitized binary images by border following
//Computer vision, graphics, and image processing, Vol. 30 (1), 1985, pp. 32-46
(https://doi.org/10.1016/0734-189X(85)90016-7).
31.
Ганиев М.А. Методы
детекции
объектов для
анализа //Актуальные исследования, Т. 10, 2024, С. 48.
32.
Qureshi R. et al. A
Comprehensive Systematic Review of YOLO for Medical Object Detection (2018 to
2023), 2023 (https://doi.org/10.36227/techrxiv.23681679.v1).
33.
Girshick
R.
et al.
Rich
feature hierarchies for accurate object detection and semantic segmentation
//Proceedings of the IEEE conference on computer vision and pattern
recognition, 2014, pp. 580-587 (https://doi.org/10.1109/CVPR.2014.81).
34.
Girshick
R. Fast R-CNN //Proceedings of the IEEE
international conference on computer vision, 2015, pp. 1440-1448
(https://doi.org/10.1109/ICCV.2015.169).
35.
Ren S.
et
al.
Faster R-CNN: Towards real-time object detection with region
proposal networks //Advances in neural information processing systems, Vol. 28,
2015 (https://doi.org/10.48550/arXiv.1506.01497).
36.
Weng
L. Object Detection Part 4: Fast
Detection Models // lilianweng.github.io, 2018. Accessed: October, 15st, 2023.
[Online]. Available:
https://lilianweng.github.io/posts/2018-12-27-object-recognition-part-4/.
37.
Lin T.Y. et al. Microsoft
COCO: Common objects in context //Computer Vision–ECCV 2014: 13th European
Conference, Zurich, Switzerland, September 6-12, 2014, Proceedings, Part V 13.
– Springer International Publishing, 2014, pp. 740-755
(https://doi.org/10.1007/978-3-319-10602-1_48).
38.
Deng J. et al.
Imagenet
:
A large-scale hierarchical image database //2009 IEEE conference on computer
vision and pattern recognition, IEEE, 2009, pp. 248-255.
(https://doi.org/10.1109/CVPR.2009.5206848)
39.
Jocher,
G.,
Chaurasia,
A.,
Qiu,
J. (2023).
Ultralytics
YOLO (Version 8.0.0) [Computer software], Accessed: November, 10st, 2023.
[Online]. Available: https://github.com/ultralytics/ultralytics
40.
Tan M., Le Q.
Efficientnet:
Rethinking model scaling for convolutional neural networks//International
conference on machine learning, PMLR, 2019, pp. 6105-6114.
(https://doi.org/10.48550/arXiv.1905.11946)
41.
Abadi
M. et al.
TensorFlow:
Large-scale machine learning on heterogeneous systems, 2015
(https://doi.org/10.48550/arXiv.1603.04467).
