Citation: S.A. Gubin, S.I. Sumskoi, A.M. Sverchkov, A.A. Agapov, D.Yu. Okunev (2018) Visualization of flow parameters in the branched systems using tree-like graphs (by the example of flow in the pipeline). Scientific Visualization 10.1: 1 - 17, DOI: 10.26583/sv.10.1.01
The approach to visualization of flow parameters in branched
systems (for one-dimensional case here) is described. It is proposed to
consider the all flow parameters as a function of a single variable - the
distance from the start point of the system. In this case, functions that are
continuous in the branching points can be represented as a tree-like structure.
That gives us a convenient way to perceive the whole space-time picture of the
flow.
The proposed approach is applied to the
visualization of flow parameters obtained by solving the water hammer problem
in the branching pipes. The model that describes this flow is given, and also
the main calculation results are presented. They are visualized both in the
form of graphs for defining the moments of time, and in dynamic mode
(animation).
Keywords: tree-like graphs, data visualization, pipeline systems, water hammer, Godunov type scheme.
In nature, technological and transportation structures there
are spatial branched systems characterized by certain parameters that vary in
space as well as in time.
Typical examples of such systems in nature are circulatory
systems of living organisms. A circulatory system has a branching, tree-like
structure: firstly, large arteries branch to capillary vessels, and then the capillary
vessels are embodied in the large venous vessels. The movement of blood through
such a system is characterized by various parameters - pressure, velocity, flow
rate, diameter and shape of the cross-section of a blood vessel, etc.
In industry, the most famous
examples of such objects type are pipeline systems: there are trunk pipelines
for transporting products for hundreds and thousands of kilometers; field pipelines
for gathering product from production sites into the trunk pipelines; process pipelines
for transporting substances within the plant; heat, water and gas networks ensuring
population supply. All these pipeline systems usually have a branched system. The
flow in the pipelines is characterized by pressure, temperature, velocity,
composition, content of gas-vapor fraction, completeness of cross section isolation,
and so on.
Finally, transport systems and roads are
another example of branching systems. Their main characteristics are traffic
intensity and vehicle speed.
All the examples listed above have one common
characteristic: their length far exceeds their transverse dimension. For
example, for trunk pipelines, the typical diameter of flow (pipe) is about 1 m,
and the length is about 1000 km.
Today description of systems with such a ratio of spatial
dimensions is most effectively carried out within the framework of
one-dimensional approach by solving one-dimensional equations, when the
parameters describing the state of the system vary only in the longitudinal
direction. In the transverse direction, all the parameters are assumed to be
unchanged. For example, when something flows in a pipeline, all flow parameters
in any cross-sectional area are assumed to be constant, although in terms of
multidimensional hydrodynamics the velocity on the axis of the pipeline differs
from the velocity in the side-wall layer. Such an "equalization" by
the over cross section speed is achieved by averaging.
Thus, when solving one-dimensional equations,
one-dimensional distributions of proeng.files of various parameters are obtained depending
on the distance. Such distributions are usually visualized in the form of one-dimensional
graphs that are easily perceived and interpreted in practical implementations.
However, if the parameters in the branching
system are described by one-dimensional distributions, then a problem arises. It
is difficult to perceive numerous dependencies of parameters on the spatial
variable not in one spatial interval, but in the whole set of basic and
branching elements.
In the paper, this problem is studied by visualizing flow
parameters in a branching pipeline system through which a slightly compressible
liquid is transported under isothermal conditions.
To visualize flow parameters in branching systems, one can
use the dependencies of various parameters on a single argument - distance. This
can be done both in the "snapshot" mode for one moment of time and in
the "video" mode for a certain time interval.
The situation when there is a single spatial interval with
the parameters to be visualized on is the simplest situation. In this case, there
is no problem either with the construction or with the perception of the
visualized data: functions of one variable are the common data representation.
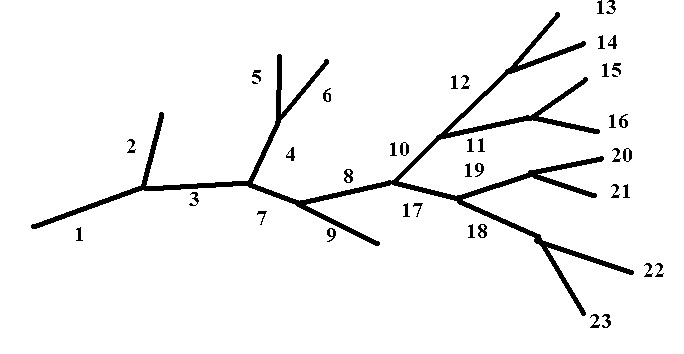
However, if there is a branched network, for example, such
as shown in Fig. 1 (there are 23 linear sections in it) then the problem arises
on how to distribute the parameters in the most convenient way.
Fig. 1. An example of a branched system
of 23 linear elements
The simplest and the most
obvious way is to establish a correspondence between each linear section and
the graph to illustrate the changes of the corresponding parameter along this
linear section. With this approach, a set of graphical functions is obtained. These
functions can be represented either in separate figures or in one figure. With
a small number of branches, you can more or less easily see the distribution of
parameters throughout the system. However, with more branching, this seems to
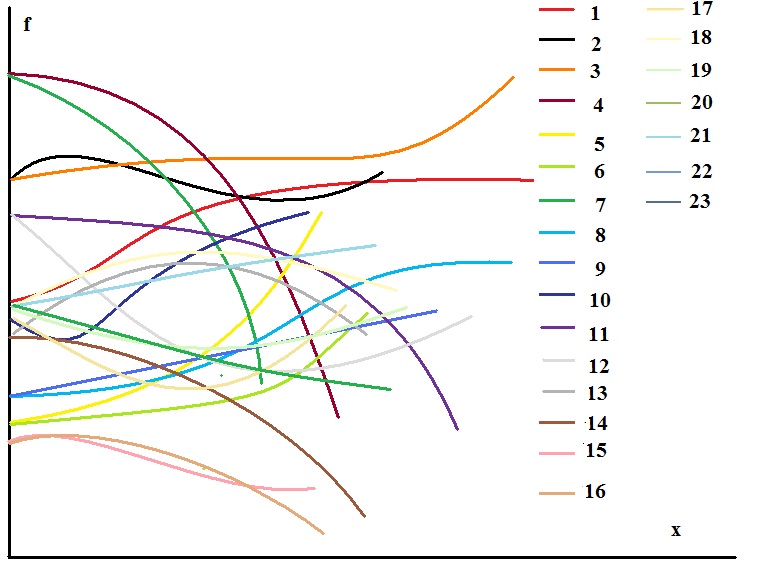
be increasingly difficult. An example of such a representation form for the
system shown in Fig. 1 is given in Fig. 2a where the dependence of a function f (x)
corresponding to a certain instant of time is represented in each of the linear
elements forming the branching system. The distance x in
this graph is measured from the branch point (for element 1 - from the
beginning of the system). In Fig. 2a, color matching was used to correlate
various dependencies with the corresponding element of the branching system. It
is hard to not acknowledge the fact that the perception of the data visualized
in Fig. 2a is extremely difficult.
Another possible way of visualization is to
use the following method: to display parameter values directly on the branch
scheme. This can be done in various ways:
- using a color scale on a plane network of a branched
system;
- using the color scale on the spatial configuration of the
branched system;
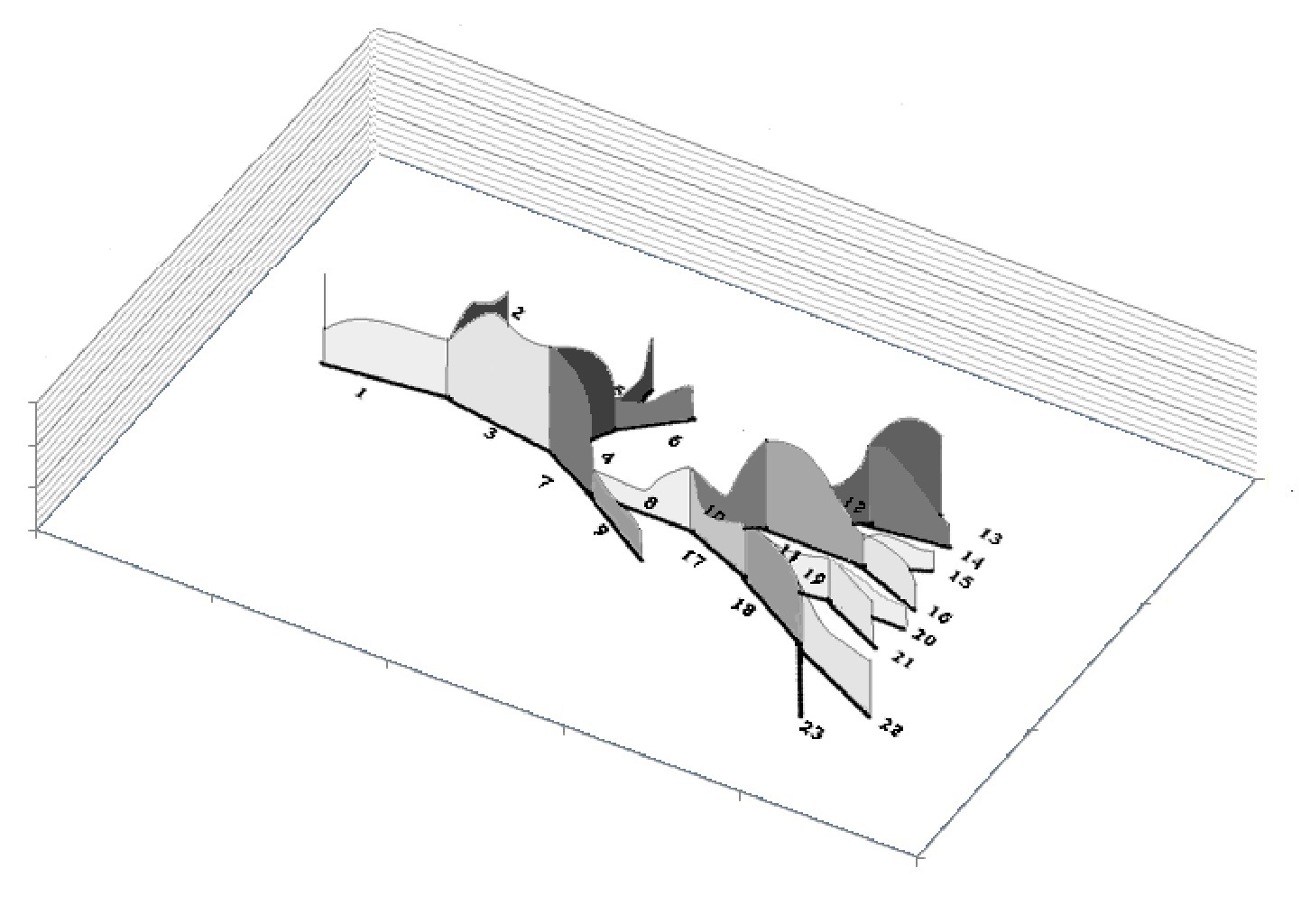
- using 3D graphics on the spatial configuration of a
branched system.
The last version of the visualization is shown in Fig. 2b. This
way of visualization, of course, simplifies the perception in comparison to to the
version shown in Fig. 2a.
Visualization with reference to the branching scheme enables
the whole perception of the entire flow pattern, and the visual image of
various sections with parameters in them is formed almost effortlessly and
automatically. However, in this 3D approach it is more difficult to compare the
parameters values at different points (compared to the 1D graphical dependence
on one parameter). In addition, if we take into account significant variation
in the length of the system in different directions, there will be an
inevitable problem of perceiving different scales in three-dimensional
visualization.
In this paper, we propose to solve this
problem using graphs with a tree-like structure. As a research object, the branching
pipeline system for the transportation of a slightly compressible liquid is selected
for consideration. The main parameters characterizing the flow in such system are
pressure, speed, flowrate, pipeline diameter, temperature and friction
coefficient. The calculation of the pressure has a particular practical
importance as it is the pressure excess of some values that lead to destruction
of the pipeline.
a)
b)
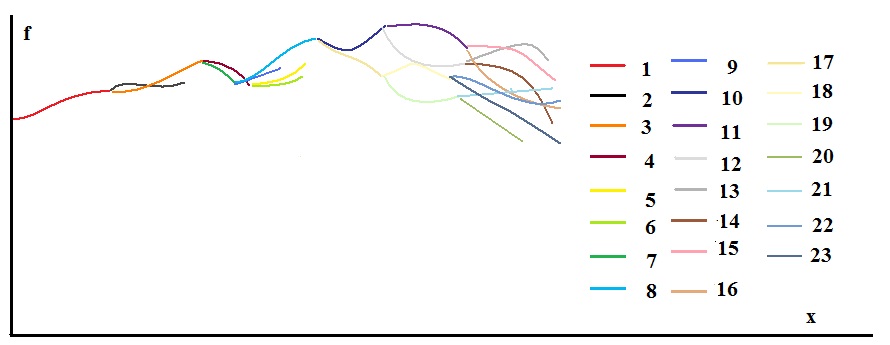
c)
Fig. 2. Possible variants of visualizing f(x)
parameter distribution at some time moment for the branched system (same as
in Figure 1): a set of 1D dependencies on the spatial
variable (a), in the form of 3D graphics with reference to the spatial
structure of the branching system (b) and as a tree-like graph (c).
Tree-like graphs represent a set of 1D
dependencies of the corresponding parameter on the distance at a certain time
moment. In this case, one graph shows dependencies for all linear sections in a
single coordinate system, where the inlet of a pipeline system corresponds to
the origin of the coordinate system, and the coordinate itself is the distance
from a particular point to the origin of the coordinate system. Thus, for each
branching system, a tree-like graph is constructed, completely corresponding to
its topology. An example of this type of visualization is shown in Fig. 2c. This
example also applies to the system shown in Fig. 1. Different colors are used to
match some 1D dependence to a specific element of a branched system. However,
it can be easily noticed that this practically does not affect the perception:
in black and white, the visualization 2c would also remain sufficiently
informative.
After comparison of these three visualization approaches
presented in Fig. 2, we can conclude that the tree-like graph approach has the
best visibility in combination with simplicity.
It should be noted that this form of
representation has a certain advantage: in the branch points of those functions
that are continuous, the graphs are branched like a tree. Therefore, the
visualization of parameters occurs in the most natural form: the distribution
of parameters in the system is presented in a form convenient for perception
(dependence of the function on one parameter) with a reference to all branching
points.
As a rule, certain integral characteristics of the flow are
of interest when processes in branched systems are modelled. For example, when
calculating flows in pipelines, it is important to not only know the current
pressure values but also the maximum pressure across all the sections for all
process time. It is also important to identify those sections where the
permissible pressure values were exceeded.
So, the tree-like diagram can be supplemented by
visualization of some integral characteristics:
- on the graph of a tree-like function corresponding to a
certain time moment, can be plotted a chart of the maximum (or minimum) values
of the corresponding parameter at a given point; for pipelines, this is usually
the dependence on the coordinate of the maximum pressures reached in the
corresponding time;
- on the graph of a tree-like function corresponding to a
certain point in time сan be supplemented by a plot of the maximum permissible
values of the corresponding value; for pipelines, such a value is usually set
to the maximum allowable pressure values above which the operation of the
pipeline can cause its destruction;
- on the graph of a tree-like function corresponding to a
certain time moment, dangerous spatial intervals can be demonstrated; at these
intervals the maximum permissible values have already been exceeded by this
time moment; in case of consideration of the pipeline system, the places of
exceeding the maximum allowable pressure at a given time moment can be highlighted,
for example by color, directly on the line of the function.
In conclusion, it should be particularly noted
that the presented approach to visualization using tree-like graphs is
applicable not only to displaying at specified moments of time, but also in the
form of animated films. In this case, in our opinion, the visibility of the
proposed approach in the data representation increases due to the continuous
perception of the entire space-time flow pattern.
In addition, animation visualization can be
more visual in case of its implementation in real-time systems, when all the changes
are reflected in real or advanced time, for example, in the control centers,
from which the real pipeline systems are controlled. Animated visualization is
indispensable in analyzing the appearances and development of emergencies.
To visualize the flow parameters in the
branched pipeline system, the software tool "TOXI+Water Hammer" [1]
was used. The "TOXI+Water Hammer" software is developed for
calculation of parameters in the pipeline systems of arbitrary configuration
including all standard types of equipment necessary for pipeline operation:
valves of various types, pumps, safety valves of various operating principles
and parameters, check valves, branches, junction of pipes of various diameters,
vessels. "ТОXI+Water Hammer" allows to describe stationary, transient
and emergency processes during the pipeline transportation of stable slightly
compressible liquids (oil, gasoline, water).
"TOXI+Water Hammer" does not require any special
hardware - calculations with the necessary for practical purposes accuracy can
be performed by standard personal computers.
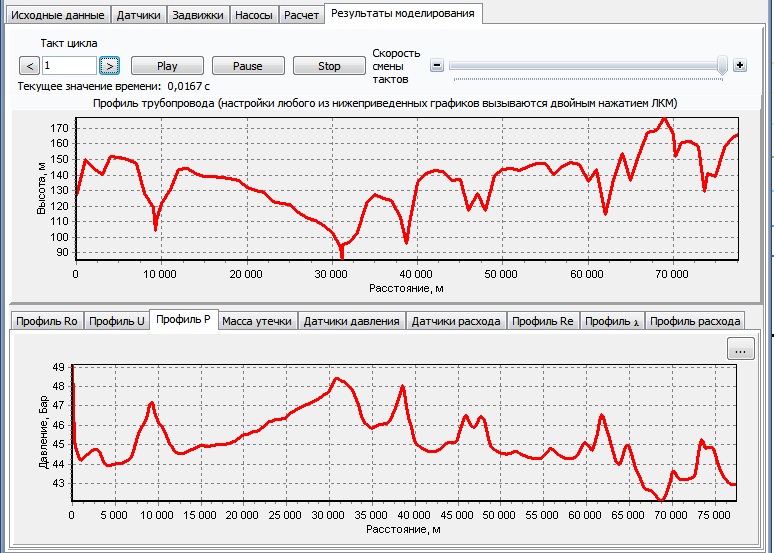
To provide a representation of the results
of fluid flow modeling in branched pipeline systems, a special subsystem is
developed in the "TOXI+Water Hammer" software (Fig. 3). This
subsystem allows to display various flow parameters (density, velocity,
pressure, flow rate, etc.) at any time moment of simulation, or in dynamics, as
animated movies with varying speed of view.
Fig. 3. Screen for visualization of modeling results
For a one-dimensional unsteady isothermal flow the flow of
liquid in an elastic deformable pipe (in isothermal approximation) is described
by a system of the following equations [2-5]:
continuity equation
(1)
momentum conservation equation
(2)
pressure-density relation (equation of state)
(3)
here r, p, u —density,
pressure and velocity of the liquid averaged over the cross section; t —time;
x — distance from the beginning of the pipeline; l(Re) — friction
factor as a function of the Reynolds number Re=Du/ν; А — cross-sectional area of the
pipeline, D — pipeline diameter, g — gravitational acceleration; b — the sine of
the slope of the route which is determined by the elevation marks of the
pipeline h(х), ν - kinematic viscosity; ρ0 — density of liquid at pressure p0
and temperature of transportation (usually p0=105Pa), с – perturbation propagation
velocity.
In this model, the following factors are taken into account:
- non-stationarity of the process;
- change in the cross-section of the pipeline during
its deformation;
- the convective motion of the medium (the second
terms in the left-hand sides of (1) and (2);
- appearance and circulation of waves generated by
stopping/starting pumps, closing valves (the first term on the right side of
(2);
- the presence of friction on the walls of the tube
(the second term on the right-hand side of (2);
- effect of gravity on the flow during the passage of
the pipeline route through a terrain with a complex relief (the third term on
the right-hand side of (2).
Equations (1) - (3) are supplemented by initial
and boundary conditions. The inlet and outlet pressures of the pipeline are set
defined as the boundary conditions, these pressures correspond to the pressures
of tanks or pumps located at the inlet and outlet of the pipeline. As initial
data, the parameters of stationary flow are specified, these parameters can be
obtained analytically from the solution of the system (1) - (3).
When the valve is closed, the boundary condition is zero
flow rate.
The system (1) - (3) describes the motion in one linear
section. In case of a branched pipeline system, when individual linear sections
are combined in a certain sequence, the system of equations (1) - (2) is
recorded for each linear section. The boundary conditions at the junctions of two
linear sections are set in such a way that the fluxes of mass and momentum from
one section to the other one are the same.
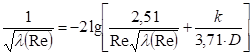
To determine l(Re) we
use the Colebroke-White relation [6], which links the friction coefficient l to the Reynolds number Re and the pipeline
characteristics (diameter D and roughness k):
(4)
where k is the pipeline roughness
Thus, the system of equations (1) - (4)
allows to consider fully real characteristics of the equipment operating on the
pipeline: pipes, pumps, valves, etc.
To solve the system of equations (1) - (4), we used Godunov-type
method previously described in [3, 7-8].
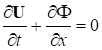
Godunov-type method is applied to systems of equations
written in a divergent form. For example, for a system of differential
equations:
(5)
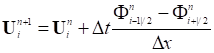
when its numerical solution is constructed
its difference analogue is as follows:
(6)
here U – vector of unknown
quantities representing a function of space x and time t, Φ – flux of quantities U,
– the discrete analogue of quantities U
referred to the i-th discret cell of the space (the coordinate of its
center is (i+1/2)∙∆x) at the n-th time step (in n∙∆t time moment), -
discrete analogue of Φ, referred to the
boundary of the i-th discret cell with the coordinate i∙∆x (right
cell boundary), и - discrete steps in time and space.
Thus, using (6) and knowing value () on the n-th
time step and the fluxes of this quantity through the boundaries of the
corresponding cell ( and ), it is possible to find the values of U((n+1)∙∆t, (i+1/2)∙∆x))() on each new n+1-th time step.
So, in Godunov's approach, the quantities are found from the solution of Riemann`s
problem, the problem of the discontinuity decay. In this problem at the initial
moment of time, one part of the half-space is occupied by a medium with
parameters , and the other one - with
parameters . At subsequent time moments, two
waves begin to propagate into two half-spaces: one wave into one half-space. And
each of these two waves will convert the initial states and into
the new states, and these new states are "stitched together"
according to certain parameters (in gas dynamics these parameters are pressure
and velocity). The problem of discontinuity delay can be solved analytically
either accurately or approximately. Knowing the parameters in the «stitching»
region one can calculate the flows and , i.e. actually solve (6).
It should be noted that Godunov-type method today is one of
the most widely used methods of numerical solution of systems of hyperbolic
equations due to its high physical validity.
When the valves are closed and the pumps are stoped or in
the process of the operating mode change, the product in the pipeline slows
down or stops completely. In its turn, flow slowing-down upstream the valves or
upstream the pump leads to the pressure increase, formation of increased
pressure area in the pipeline and the subsequent propagation of the increased
pressure area along the pipeline route. Such propagation of compression waves
in the pipelines is called water hammer [9].
A water hammer is a significant hazard to the integrity of
pipelines since a pressure increase can lead to pipe rupture or formation of
dangerous defects [10].
For example, a water hammer was one of the causes of the pipeline
rupture accident at the Sheskharis tank farm (Novorossiysk) and oil release to
the port water area [11].
The danger of a water hammer in pipeline systems is worsened
by the fact that, as a rule, there are one-dimensional flows in pipelines. Since
there is one-dimensional geometry, compression waves propagating through the
pipeline are attenuated rather slowly what leads to formation of potentially
dangerous zones over tens of kilometers.
Water hammer investigations have been carried out for dozens
of years, beginning with the work of N.E.Zhukovsky [9] and ending with modern
monographs, thesis and articles [1, 10, 12, 13, 14]. Typically, water hammer is
considered in a single pipeline. However, real pipeline systems often have a
more complex topology, including branching and looping (branching with a return
to the main pipeline).
Branching structure of a pipeline can have a significant
impact on the development of the water hammer flow.
The water hammer problem in a branching system is extremely
important from a practical point of view. Indeed, the consequences of a water hammer
are the most catastrophic in cases of quick valve shut-off. Such a quick (in
3-5 seconds) operation of the valve and complete cutoff of the flow often take
place while shipping at sea terminals. It is important to cut off the flow
quickly because the release can pollute the aquatic environment what leads to the
huge environmental damage. Shipment of large volumes at high rate is often carried
out through several pipelines in order to reduce the total shipment time. As a
result, there may be an intense water hammer in a branched system.
Below we consider the problem of generation and development
of a water hammer in a pipeline with one and several branches.
Let us consider the following
model configuration of the branching pipeline (see Figure 4). Distance from the
inlet of the pipeline (point A) to the branch point (point O) is equal to 20
km, the pipe has a diameter of 1 m, at point O, the pipeline branches into two
identical pipes 20 km long and 1/(2)0,5 m in diameter
each, that is, the cross-sectional area of the two branches is equal to the
cross-sectional area of the main pipe. All the pipes have the same roughness of
- 0.3 mm and are laid on flat terrain. A pressure at the inlet of the pipe is
equal to 1.0 MPa. Pressures at the end of each branch pipes are equal to 0.3
MPa. Also, there are valves which shut off the flow completely within 0.1 sec
Fig. 4. A model
branching pipeline system (one branch).
The scenario under which valve №2 cuts off the flow is
considered.
In the calculation, it was assumed
that the propagation celerity of the wave coincides with the speed of sound and
is equal to 1300 m/s. Density of the transported product is equal to 840 kg/m3
at p0=105,
and kinematic viscosity is equal to 2 10-6м2/с.
The problem was solved using a grid with a
spatial step of 400 m.
To solve the second problem the following configuration of a
pipeline with three branches was considered (see Figure 5). The main pipeline
consisted of 4 sections (№№ 1, 3, 5 and 7 in Fig. 5), each with a length of 10
km. The diameter of this main pipeline decreased from section to section:
- tube in section №1 had a diameter of 1 m;
- tube in section №3 had a diameter of 0,7071 m;
- tube in section №5 had a diameter of 0,5 m;
- tube in section №7 had a diameter of 0,3536 m;
In the system under consideration there were three branches
each with a length of 5 km (see Figure 5):
- branch №2 departs from the main pipeline at the junction
of sections №1 and №3; this branch has a diameter of 0.7071 m; pressure at the
outlet of branch №2 is equal to 0.5 MPa;
- branch №4 departs from the main pipeline at the junction
of sections №3 and №5; this branch has a diameter of 0.5 m; pressure at the
outlet of branch №4 is equal to 0.3 MPa;
- branch №6 departs from the main pipeline at the junction
of sections №5 and №7; this branch has a diameter of 0.3536 m; pressure at the
outlet of branch №6 is equal to 0.1 MPa;
Fig.
5. A model branching pipeline system (three
branches).
The pressure at the entrance of the pipeline system is equal
to 1.0 MPa and the pressure at the end (at the outlet of section №7) - 0.1 MPa.
All pipes are laid on flat country.
All pipes have the same internal surface roughness - 0.03
mm.
Water is pumped through the
pipeline at a temperature of 20°C. The initial density (at 0.1 MPa) was assumed
equal to 1000 kg/m3 and kinematic viscosity - 8.9 10-6
m2/s.
Propagation celerity of the wave equal to 1480 m/s was used
in the calculation.
The following scenario of a water hammer was considered. With
a steady flow in the pipeline a gate valve was activated at the end of the main
pipeline (at the end of section №7). The time for complete cut off of the flow
at the valve shut off was equal to 2 s.
The problem was solved by using a grid with
a spatial step of 500 m.
Figure 6 shows the pressure proeng.files at
different time moments. In this figure, the main pipe corresponds to the
section from the inlet (point A) to valve №1, the branch in this figure
corresponds to the section from point O to valve №2.
a)
b)
Fig. 6. Pressure proeng.files in the pipeline
at time moments of 10, 20 s (a) and 200, 400, 600, 1400 s (b) after valve №2
shut off.
In Fig. 6a one can clearly see how the wave that was formed
in the branch (see Fig. 6a, time moment - 10 s) enters the main pipeline (see
Fig. 6a), the time moment is 20 s).
Figure 6b shows how after the stoppage
of wave circulation in the system a slow increase in pressure occurs across all
sections of the pipeline. Most significantly, the pressure rises from point O
to valve №2, where the flow stops completely.In the other branch (from
point O to valve №1) and in the main pipe (from the beginning to point O) the
pressure increase is less significant (by the relative value).
Note that the maximum attainable pressures will also be
affected by the change in the closing delay time of the valves on the pipeline
branches. Only an accurate and effective visualization system can enable proper
analysis of situations affected by various closing delay time of the pipeline
branches valves.
The results of the water hammer calculations in a pipeline
system with several branches in the formulation described in 4.2 are presented
below.
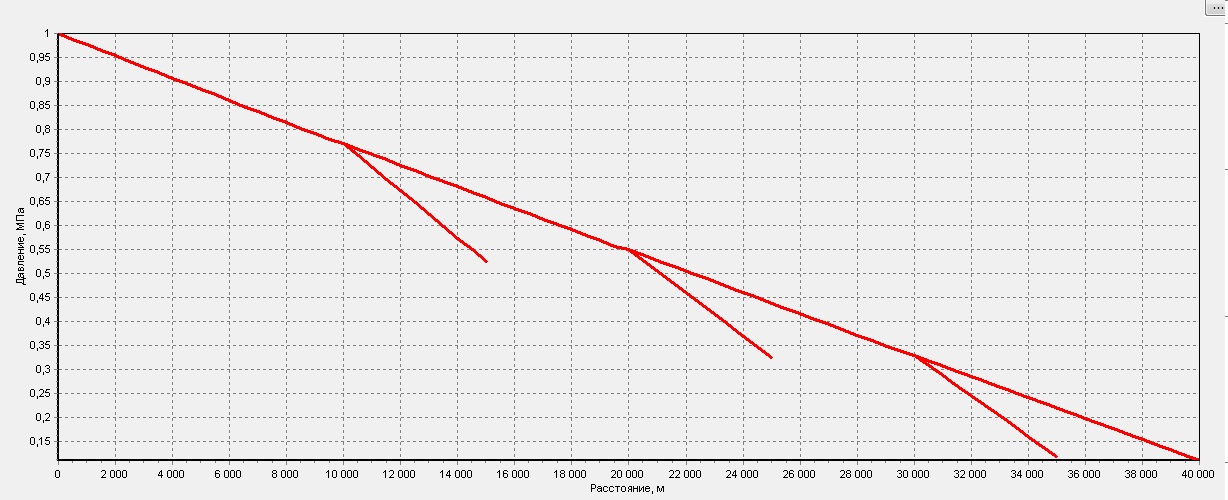
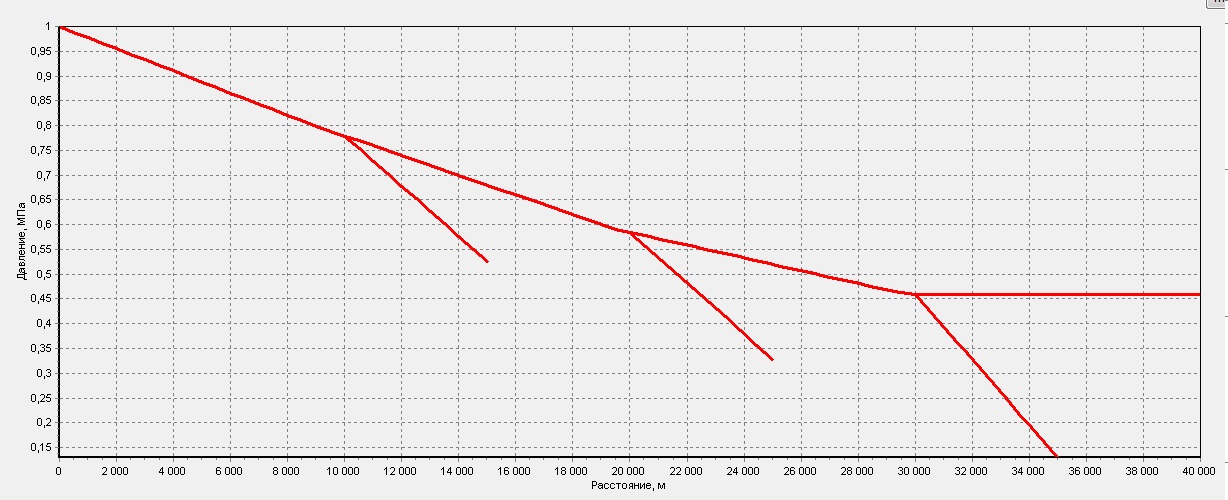
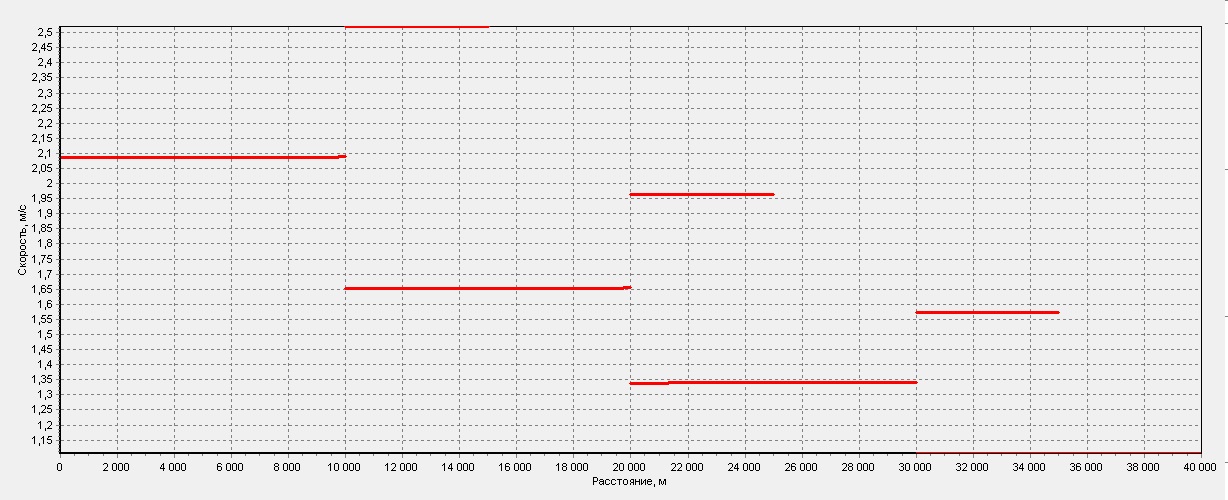
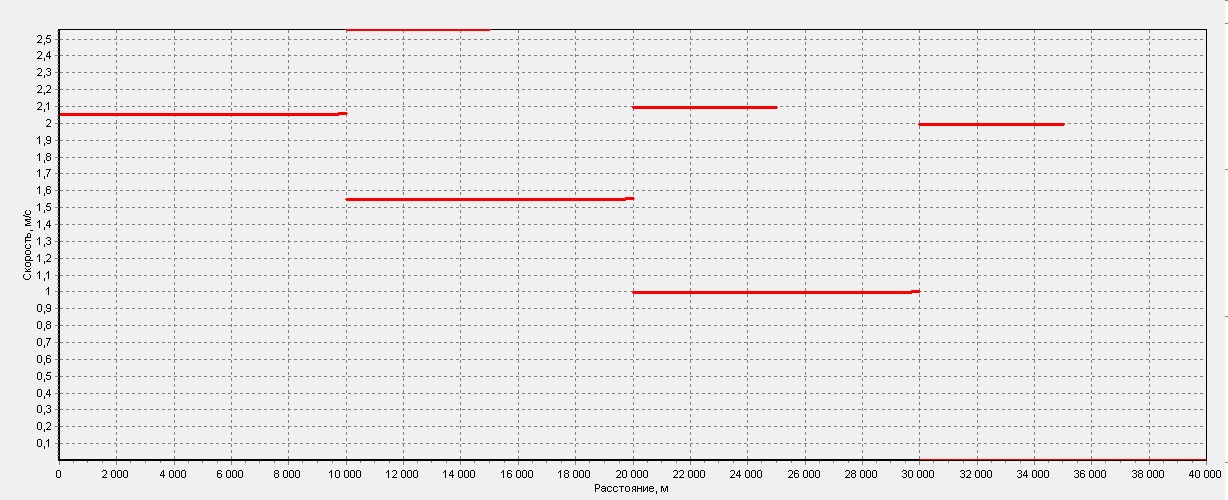
The distributions of pressure, velocity, density and mass
flow rate for two stationary states of the system (before the valve is closed
at the end of Section №7 and after it is closed and a new pumping regime is
established) are shown in Fig. 7-10. In Fig. 7-10 it can be seen that after
closing the valve the flow in section №7 is stopped and the pressure is
equalized along its entire length. At the same time, the mass flow rate in the
system drops slightly. This is well seen in Fig. 10 (a) and (b) where the flow
rate of the whole system determined by the flow rate in section №1 falls from
1630 kg/s to 1610 kg/s. There is some redistribution of flows between the long
ten-kilometer sections and the short five-kilometer sections. The flow rates in
sections №3 and №5 decrease while the flow rates in sections №2, №4 and №6
increase (see Figure 10). In accordance with the change in flow rates, such
parameters as velocity and pressure also change. The velocity in the short
sections increases while in the long sections it decreases (see Figure 8). Gradients
of pressure increase in short sections and decrease in long ones (see Figure
7).
From the presented data, it is also easy to see a slight
change in the density of the flow (see Fig. 9).
Intermediate states in the system are shown in animations presented in Fig. 11 and 12 where pressures and velocities are visualized.
In these animations, the beginning of the valve shut off
occurs in 290 s.
In Fig. 11 one can see that after 6 seconds after the
closing of the valve, the wave from the end of the pipeline approaches the
first branch from the end (at the end of section No. 5). This wave begins to
unload in sections №5 and №6. The pressure on the valve at this time moment
reaches 1.8 MPa. Approximately 9 seconds after the valve closes, the wave
reaches the end of section №6 and begins to unload through this outlet. By this
time, the pressure on the closed valve reaches almost 1.9 MPa and at the first
branch from the end - 0.7 MPa.
The compressive wave that goes through section №5, reaches
the second branch from the end and begins to unload in sections №3 and №4 after
about 12 seconds after the valve shut off starts. By this moment, the pressure
on the closed valve has reached 1.9 MPa (10 seconds after the valve shut off
starts) and begins to decrease due to the mass outflow from section №7 (the
velocity for Section №7 is less than zero, see Figure 12). The pressure at the
first branch from the end is equal to 1.1 MPa. At the same time, due to the
larger (compared to section №6) diameter of section №5 the pressure in section
№5 increases substantially up to 1.17 MPa.
After 18 seconds after the valve shut off starts, the water
hammer wave begins to unload into sections №1 and №.2. At the same time,
pressure in Section №3 increases, and pressures in sections №5 and №7 decrease.
A traveling wave is formed in the main pipeline. The local maximum pressure in
this wave is equal to approximately 0.86 MPa. This maximum is located at 14 km
from the beginning of the pipeline at 24 seconds after the valve shut off starts.
The minimum pressure on the valve is reached approximately in
31 seconds after the valve shut off starts. After that, the outflow of mass
from section №7 is replaced by its inflow in this section from section №3 (the
velocity in section №7 grows higher than zero, see Figure 12) and the pressure
begins to increase in section №7 on the closed valve. Also, pressure is rising
throughout the pipeline.
The pressure increase on the valve continues up to 51 s
after the start of its closing. The pressure on the valve reaches 0.76 MPa. Then
the pressure on the valve begins to decrease. With some time delay (about 3 s),
the pressure begins to decrease in the whole pipeline system.
After reaching the next minimum pressure (0.12 MPa) on the
valve (73 s after the start of its closing), another pressure increase begins.
Such oscillations in the flow are observed along the entire
length of the pipeline. The greatest amplitude of oscillations takes place on a
closed valve. In the main part (sections № 1, 3, 5, 7) the amplitude of
the oscillations increases with the approach to the pipeline beginning.
Pressure peaks in damped pulsations on the valve are achieved after 94 s, 133 s,
153 s, 181 s and 213 s (after the valve starts to operate). They are 0.72 MPa,
0.54 MPa, 0.46 MPa, 0.50 MPa and 0.49 MPa respectively. Pressure minimums are
reached after 118 s, 146 s, 164 s, 200 s and 222 s (after the valve has started
to operate) and they are 0.31 MPa, 0.44 MPa, 0.41 MPa, 0.42 MPa and 0.45 MPa.
Approximately 240 s after the closure of the valve, the
pressure and velocity oscillations in the system are practically damped.
All these pressure oscillations at the end of Section №7 are
shown in the animation in Fig. 13.
a)
b)
Fig. 7. Initial (a) and final (b) pressure
distribution in brunched pipeline system.
a)
b)
Fig. 8. Initial (a) and final (b)
velocity distribution in brunched pipeline system.
a)
b)
Fig. 9. Initial (a) and final (b)
density distribution in brunched pipeline system.
a)
b)
Fig. 10. Initial (a) and final (b)
flow rate distribution in brunched pipeline system.
Fig. 11. Time variation of pressure in the branched system.
Fig. 12. Time variation of velocity in
the branched system.
Fig. 13. Time variation of pressure at
the closed valve latch (the end of section №7).
An approach that allows visualization of flow parameters in
branched systems is proposed in this paper. Graphs with a tree-like structure
(one-dimensional dependencies of the corresponding parameters on the distance
from the beginning of the system) are used.
Such visualization combines the simplicity of the
traditional representation of one variable functions and the convenience of
perceiving these functions for branched systems.
The proposed approach to visualization is illustrated by
examples from the field of pipeline transport, for example, the solution of the
water hammer problem in a branched system.
The results of calculations with visualization in the form
of a tree-like structure allow:
- to observe the propagation of compression/rarefaction
waves along a branching system including dynamic visualization
("video" mode);
- to observe the unloading of compression waves at the
branching points into the pipelines connected at the branching point and at the
inlet/outlet of the pipeline system;
- to perceive in the optimal way the interaction of
circulating waves, including compression.
The last one is especially important since it allows to find
out quickly the cause of the emergence of zones with high pressures appearance.
The proposed visualization (especially in the dynamic mode of
"video") allows to identify interacting waves in real time and to understand
instantly which events and what combination of factors has led to the appearance
of high-pressure areas.
Based on the approach to modeling and visualizing flows in the
branched pipeline systems that was presented above "TOXI+Water
hammer" software has been developed. It helps to simulate flows in pipeline
systems using a visualization subsystem based on tree-like graphs.
Thus, the modeling of flows in pipeline systems shows that
only when visualization of the pattern of wave propagation in pipes is
available it is possible to perceive the flow pattern directly. Besides, this
perception is the most convenient when tree-like graphs are used.
The work was supported by the Russian Science Foundation, grant No. 16-19-00188
Sverchkov A. M., Agapov A. A., Sumskoi S.I.,
Egorov A. F., Sof’in A.S. Modelirovanie avarijnyh utechek na magistral'nyh nefteprovodov [Modeling of emergency releases
at oil trunk pipeline] //Bezopasnost truda v promyshlennosti, № 9,
2014, pp. 50-53 [in Russian].
Lurie M.V. Matematicheskoe modelirovanie processov truboprovodnogo transporta nefti, nefteproduktov i gaza [Mathematical Modeling of Gas, Oil and Oil Product Transport]. Moscow: Gubkin University Press, 2003 [in Russian].
Sumskoi S. I., Sverchkov A. M., Lisanov M. V.,
Egorov A. F. Modelling of non-equilibrium flow in the branched pipeline
systems // Journal of Physics: Conference Series, Vol. 751, №1, 2016,
012022 (doi:10.1088/1742-6596/751/1/012022) (http://iopscience.iop.org/article/10.1088/1742-6596/751/1/012022
)
Sumskoi S. I., Sverchkov A. M., Lisanov M. V.,
Egorov A. F. Simulation of systems for shock wave/compression waves
damping in technological plants // Journal of Physics: Conference Series,
Vol. 751, №1, 2016, 012023 (doi:10.1088/1742-6596/751/1/012023) (http://iopscience.iop.org/article/10.1088/1742-6596/751/1/012023)
Sumskoi S. I., Sofin A. S., Lisanov M. V.
Developing the model of non-stationary processes of motion and discharge
of single- and two-phase medium at emergency releases from pipelines//
Journal of Physics: Conference Series, Vol. 751, №1, 2016, 012025
(doi:10.1088/1742-6596/751/1/012025) (http://iopscience.iop.org/article/10.1088/1742-6596/751/1/012025)
Gubin S.A., Gubina T.V., Sumskoi S.I. Modelirovanie perehodnyh i avarijnyh processov v magistral'nyh truboprovodah s pomoshh'ju metoda S.K.Godunova [Modeling of Transient and Emergency Processes in Trunk Pipeline Systems using Godunov’s approach] // Bezopasnost truda v promyshlennosti, №10, 2013, pp.66-71. [in Russian]
Sumskoi S.I., Sverchkov A.M. Modeling of
Non-equilibrium Processes in Oil Trunk Pipeline Using Godunov Type Method
// Physics Procedia, Vol. 72, 2015, рр. 347–350.
Zhukovsky N. E. O gidravlicheskom udare v vodoprovodnyh trubah [About water hammer in
water pipes]. Moscow:-Leningrad: State Publishing of Technical and Theoretical Literature, 1949. [in Russian]
Gusein-zade M.A. Osobennosti volnovogo techenija v trubah. Gidravlicheskij udar. [Features of wave propagation flows in pipeline.
Water hammer]. Moscow: Oil and Gas, 1999. [in Russian]
Guschin V.V. Avarija na truboprovode № 9 neftebazy «Shesharis» AO «Chernomortransneft'» [The Accident at Pipeline #9 of “Shisharis’ Oil
Tank Farm”] // Bezopasnost truda v promyshlennosti, № 1, 1998, pp. 8–9. [in
Russian]
Truboprovodnyj transport nefti [Oil Pipeline Transportation]. In 2 volumes // Ed/
S.M.Winestock: Nedra - Business Center, 2002-2004. [in Russian]
Arbuzov N. S. Obespechenie tehnologicheskoj bezopasnosti gidravlicheskoj sistemy morskih neftenalivnyh terminalov v processe naliva sudov u prichal'nyh sooruzhenij (teorija i praktika) [Providing of technological safety of the
hydraulic system of marine oil terminals in the process of loading vessels
at mooring facilities (theory and practice)], Moscow: Thesis for the degree
of Doctor of Technical Sciences, 2014. [in Russian]
Sumskoi S. I., Sverchkov A. M., Lisanov M. V., Egorov
A. F. Simulation of compression waves/shock waves propagation in the branched
pipeline systems with multi-valve operations // Journal of Physics:
Conference Series, Vol. 751, №1, 2016, 012024
(doi:10.1088/1742-6596/751/1/012024) (http://iopscience.iop.org/article/10.1088/1742-6596/751/1/012024)
RUSCOMNADZOR Reg. Number El. № ФС77-37344 INFORMREGISTR Reg. Number № 0421100125
Copyright http://sv-journal.org