Sign language is the most essential
way for deaf people to communicate and interact with others. There are two main
sign language recognition systems: image-based and sensor-based. The major advantage of
image-based system is that user does not need to use complicated devices, but
this technique needs extra computations in the preprocessing stage, image
processing, and artificial intelligence to recognize and interpret signs. Sensor-based
systems use some equipment with sensors like gloves equipped with sensors. Sensor
based systems require the users to wear sensor-based gloves or any sensor-based
instruments. Microsoft
Kinect is a motion sensing input device by Microsoft. It relies on depth
technology, which allows users to deal with any system via a camera in which the user uses hand gestures or verbal commands to recognize objects
without the need to
touch the controller. It used to track
standing skeleton with high-depth fidelity. It has an RGB camera, voice recognition capability,
face-tracking capabilities, and access to the raw sensor records. Once the data
has been collected from the user, the recognition system, whether it is sensor-based
or image-based, must
use this data for processing to recognize the signs. Several approaches have
been proposed for sign recognition including fuzzy logic, neural networks,
support vector machines, k-nearest neighbors, hidden markov models…etc. Single
sign classifier assumes that signs are pre-segmented, it recognizes sign by
sign not continuous sentences. It supposed to automate the process of splitting
a sentence into words, this process is called segmentation. Segmentation is one
of the major issues of information processing in sign languages. Motion speed
during capturing of continuous sentences is used as a segmenter. It is
noticeable that the motion speed is changed during performing the signs, when
the transition from one sign to another occurred the motion speed is slowed
down.
The main aim of this paper
is to develop Arabic Sign Language (ArSL) recognition system that identify the user
signs captured by Microsoft Kinect using one of two techniques: model-based
(i.e.) machine learning classifiers or direct machine (i.e.) DTW (Dynamic Time
Wrapping) and segment Arabic continuous sentences using speed motion detection
method. The structure of this paper is organized as follows. Section 2 presents
the related work of the sign language recognition. The proposed system is
presented in Section 3. The experiments setup and results are presented in
section 4. Section 5 contains conclusion & future work.
Al-Jarrah and Al-Omari
developed automated translation system of alphabets gestures in the Arabic Sign
Language (ASL) that does not use visual markings. The images of not covered hands
are processed to get a set of features that are translation, rotation, and
scaling invariant. A system accuracy of 97.5% was achieved on a database of 30
Arabic alphabet signs [1]. Maraqa and Abu-Zaiter
introduced the use of neural networks in human hand gesture recognition for
static images and dynamic gestures. They presented the use of feed-forward and
recurrent neural networks and recurrent neural networks along with its
different architectures. Then, they tested the proposed system, a database of
900 samples, containing 30 gestures performed by two persons with colored
gloves that used in their experiments. The accuracy rate for the recognition of
the static gestures reaches 95% [2]. El-Bendary et al. developed a sign language
recognition system for the Arabic alphabets with an accuracy of 91.3%. The
proposed Alphabets Translator (ArSLAT) does not rely on using any gloves or
visual markings to complete the recognition task. ArSLAT deals with images of
bare hands, which allows the signer to interact with the system in a natural
way. Extracted features from a video of signs are the input to the system and
the output is recognized sign as a text. The proposed ArSLAT system composed of
five steps; pre-processing, detect the best-frame, detect the category, Extract
the features, and finally classification. The used extracted features are
translation, scale, and rotation invariant to make the system flexible [3]. Hemayed
and Hassanien introduced a recognition technique for the hand gestures which
represent the Arabic sign language alphabet and perform sign to voice
conversion in order to enable Arabian deaf people to communicate with their
societies. The proposed system focused on static and simple moving gestures.
Principal Component Analysis algorithm is applied to the extracted edges that form
the predefined feature vectors for signs library. The Euclidean distance is
used to measure the similarity between the signs’ feature, the nearest vectors
sign is selected, and the corresponding sound clip is played. They applied the system
to more than 150 signs and gestures with accuracy near to 97% at real time test
for three different users [4]. A survey on sign language processing is proposed
by Kausar & Javed. They categorized algorithms into two categories static
and dynamic methods. They identified important topics in sign language
recognition as segmentation, size of dictionary, invariance, unrestricted
environment, gestures variety, generality, feature extraction, start/end
identification of gesture sequences and feature selection. They showed some
challenges and recommendations for future research in the field of sign
language processing [5]. Azad et al proposed a novel and real-time approach for
sign language recognition system using hand gestures. In the proposed model,
the main step is extracting the hand gestures from the image by using three
main steps: segmentation, morphological processing and finally features extraction.
They applied the cross-correlation coefficient in order to recognize the
gestures and they used the data base of the American Sign Language, the
accuracy reached 98.34 and they suggested the using of video sequence for
virtual reality to recognize the dynamic hand gestures [6]. Naoum et al.
developed an image-based system for sign language alphabets with an accuracy of
50%, 75%, 65% and 80 % for bare hand, hand with a red glove, hand with a black
glove, and hand with a white glove respectively. The proposed system starts by
finding histograms of the images. Extracted profiles from histograms are then
used as input to the K-nearest Neighbor classifier. The algorithm is designed
to work as a first level of recognition upon a series of steps to convert the
captured character images into actual spelling [7]. Elons et al. proposed an
ArSLR system based on neural networks that able to compensate for lighting
non-homogeneity and background brightness. The proposed system showed stability
under geometrical transforms, lighting conditions and bright background, achieving
a recognition accuracy of 90%. The ‘‘Continuity Factor’’ is defined and
considered as a weight factor of the current pulse in signature generation
process. This factor measures the simultaneous firing strength for connected
pixels [8]. SamirElons et al, proposed a method to enhance the feature quality
based on neural network. The model defines continuity factor is proposed as a
weight factor of the current pulse in signature generation process. The
proposed method has been employed in a feature extraction model that is
followed by classification process that training and testing for Arabic sign
language static hand recognition [9].
Researches on Arabic sign
language recognition (ArSLR) has a great rise recently. Mohandas et al, at
2014, presented a study that focused on both image-based and sensor-based
approaches. They showed the most popular types of ArSLR algorithms, mentioned
the main features of the different approaches. They categorized their work to
three types alphabet, isolated word, and continuous recognition [10]. Almasre
et al, developed a supervised machine learning model for hand gesture
recognition to recognize
Arabic Sign Language (ArSL), using two sensors: Microsoft's Kinect and a Leap
Motion Controller. The proposed model relies on the concept of supervised
learning to predict a hand pose from the two sensors depending on depth images
and defines a classifier to transform gestures based on 3D positions of a
hand-joints direction into their letters. Recognized letters are compared and
displayed in real time. They used the 28 letters of the Arabic alphabet many
times from different volunteers to create a dataset gestures for each letter of
an ArSL built by the depth images retrieved both devices. The results indicated
that using the two devices for the ArSL model were essential in detecting and
recognizing 22 of the 28 Arabic alphabets correctly 100 % [11]. ElBadawy et al,
proposed an integrated system used a hybrid types of sensors to capture all
sign features. They customized Leap motion to capture hands with fingers
movements. Two digital cameras are used to capture face features and body
movement. The system performed 95% recognition accuracy for a dataset of 20
dynamic signs due to the additional modules for facial expressions recognition
and body movement recognition [12]. Aliyu et al developed a Kinect based system
for Arabic sign language recognition system. The developed system was tested
with 20 signs from the Arabic language dictionary. Video samples of both true
color images and depth images were collected from volunteer user. Linear
Discriminant analysis was used for features reduction and sign classification.
Furthermore, fusion from RGB and depth sensor was carried at feature and
decision level performed an overall accuracy of 99.8% [13]. Jma et al, proposed a new
approach based on hand gesture analysis for Arabic sign language (ArSL)
alphabet recognition by extracting a histogram of oriented gradient (HOG)
features from a hand image and then using them to train an SVM models. Their
approach involves three steps: (i) Hand detection and localization using a
Microsoft Kinect camera, (ii) hand segmentation and (iii) feature extraction using
Arabic alphabet recognition. The results showed accuracy about 90% [14].
Almasre et al, introduced a sign language recognition model that interpreted a
set of Arabic Sign Language alphabets using Microsoft’s Kinect and a supervised
learning algorithm was used with the Candescent Library. The dataset of the
model was collected by allowing users to make certain letters of the Arabic
alphabets. The proposed model filtered each sign based on the number of the
used fingers and then calculated the Euclidean distance between the contour
points of a captured sign and a stored sign, and then comparing the results with
a certain threshold [15].
Mohandes et al, proposed a
new method for Arabic sign language to track one hand or both and one finger or
more at different locations using two different sensors; They generated a
3-dimensional (3D) interaction space and extracted 3D features related to the
detected hand(s). They analyzed the metrics related to the processed features.
The applied classifier integrated with two different sensors, Leap Motion (LMC)
and Kinect then all Arabic alphabets signs are performed in the interaction
space [16].
Almasre et al, proposed a
model to detect the hand gestures of Arabic Sign Language (ArSL) using two
depth sensors applied on Arabic words. They examined 143 signs gestured by set
of users (10 users) for five Arabic words. These sensors worked with depth
images of the upper part of humans, from which 235 angles (features) were used
for all joints and every pair of bones. The used dataset was divided into a
training dataset about more than one hundred observations and a testing set is about
34 observations. They used support vector machine (SVM) classifier with
different parameters in order to obtain four SVM models using both linear and
radial kernel function. The accuracy of the model for the training set for the
SVMLD, SVMLT, SVMRD, and SVMRT models was 88.92%, 88.92%, 90.88%, and 90.884%,
respectively. The accuracy of the testing set for SVMLD, SVMLT, SVMRD, and
SVMRT was 97.059%, 97.059%, 94.118%, and 97.059%, respectively [17].
Most of the previous
systems concerned with static gestures which has no motion ,there for the aim
of this research is to present a very accurate model for recognizing the Arabic
dynamic gestures using Microsoft Kinect in order to overcome the constraints of
the sensor based approach and vision based approach also as presented in the
literature there are few studies presented continuous recognition systems for
Arabic sign Language especially using Kinect device ,so that we introduces
accurate and robust model for sentence segmentation based on simple method (The
minimal velocity detection) with acceptable accuracy for the segmentation and
also segmented words recognition .
In this section we will
discuss the elements of our proposed system for Arabic sign language
recognition using Microsoft Kinect. We describe the various phases of our
system from the capturing the data using Kinect until the gesture is
recognized. We concentrate on the feature extraction and selection phase
because we believe it is a very crucial phase in the recognition system. The
structure of the recognition system is shown in Fig.1. First of all, (1)
data acquisition phase is performed, in this step Kinect depth camera is used
to infer human skeleton positions, then (2) skeleton tracking & joint
selection phase coming after it, in this step we were trying to access each
skeleton data such as joint coordinates, joint types, position and bone
orientation individually and choose the joints of interest, then (3) the
information about these joints are received by our system as frames which are
updated with the skeleton of the user , then (4) normalization phase which is
applied on the collected frames should overcome mainly on two problems
,firstly the variation of the user positions ,secondly the variation of the
users' sizes , then (5) applying some classifiers as SVM, KNN and ANN to
recognize the Arabic signs then, (6) applying majority voting to select the
most frequent classified class and output the sign. Finally (7) applying the DTW
(Dynamic Time Warping) instead of the classifiers in order to compare the
results of it with the results of the machine learning approach.
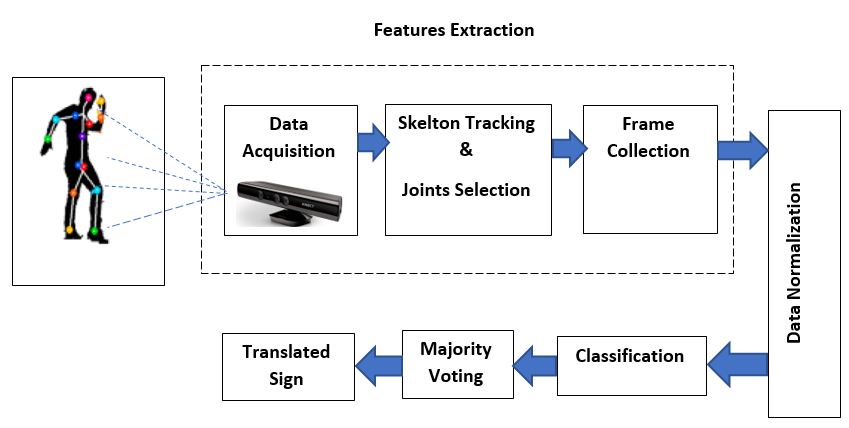
Fig.1 System Block Diagram
The following diagram in
Fig.2 represents the flow chart of our proposed model.
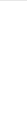
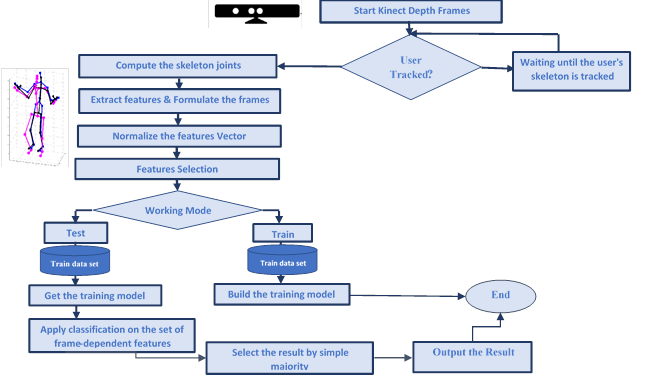
Fig. 2 Proposed Model Flow Chart
Kinect windows SDK contains
a set of APIs which access easily to the skeleton
joints. So, in this phase, information about the movements of the user are
collected. When starting the kinect's depth camera, it could capture 20
skeleton joints as shown in Fig. 3 with rate of 30
frames per second using its SDK.
Fig. 3 Skeleton Joints
Skeleton
tracking allows Kinect to recognize people and follow their actions. In this
phase, some algorithms and mathematical operations in kinect's SDK are used to
interpret the 3D data from Kinect and infer the positions of detected objects.
For joint selection, after carefully studying the signs of our dictionary for
the system, only 10 joints out of the 20 resulted to be significant for the
description of a sign: Hand (Left & Right), Shoulder (Left & Right),
Elbow (Left & Right), Wrist (Left & Right), Spin Mid and Head Center.
There is no point in tracking others joints such as the knees, the feet, etc.
because they remain almost static during the execution of the sign.
While performing the
gestures user can be at any position and can be of any size i.e. the variation
in height and overall body built up. Any variation in depth can cause a
considerable variation of the X and Y values.
a) Normalize User
Position
First for the user's
position as shown in Fig.4 , the distances
obtained for joints in X, Y, Z coordinates are scaled by subtraction of the
spine-mid joint coordinates from the required joint skeleton points. Now if the
coordinates are taken at any position whether it is totally right or left
corner, it will be scaled, and no conflict will be happened.
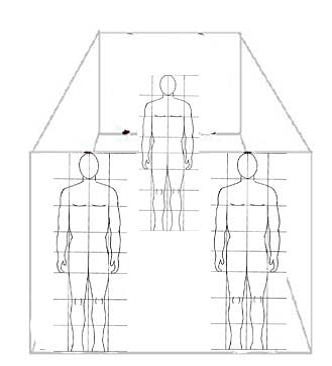
Fig. 4 Normalization of Position
For our features we get the
spherical coordinates instead of using the Cartesian coordinates X, Y, and Z,
the spherical coordinates considering SpinMid Joint as the origin. In mathematics,
the spherical coordinate system is represented by three-dimensional space
where the position of a point is specified by three numbers: the radial
distance r for any point from a fixed , the (ϕ) which is the angle between
the positive x-axis and the line denoted by r as in Fig.5 , (θ) which is the
angle that is measured between the positive z-axis and the line from the
origin to the point . After the evaluation of the system, the results showed
that the (θ) feature does not has any affect and no meaningful, so we will
depend on r and ϕ in our calculations and we compute them through Eq.1 and
Eq.2 respectively.
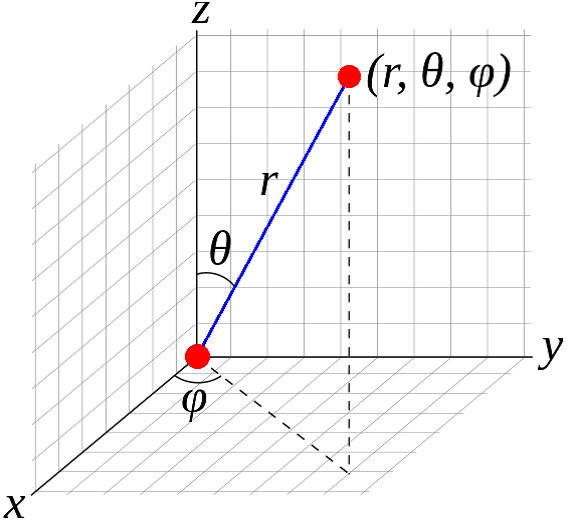
Fig.
5 Spherical coordinates.

(1)

(2)
Where,
n is the number of joints
from J,
r is a radial distance,
 is x coordinate of spin-mid joint,
is x coordinate of spin-mid joint,
 is y coordinate of spin-mid joint,
is y coordinate of spin-mid joint,
 is z coordinate of spin-mid joint.
is z coordinate of spin-mid joint.
b. Normalize User Size
For the user's size, it may
differ from one user to another as in Fig.6 and this may cause a
conflict to the system so in our system we normalize all relative distances by
the factor ( the distance between the head and spin-mid as in Eq.3, this
value refers to the size of the user and all distances can be normalized
according to its value .
the distance between the head and spin-mid as in Eq.3, this
value refers to the size of the user and all distances can be normalized
according to its value .
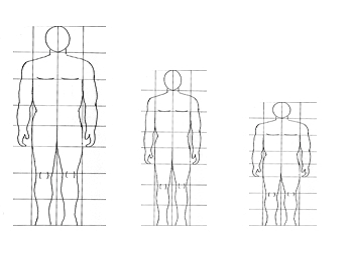
Fig. 6 Normalization of User's size
(3)
Where,
n is the number of
joints from J,
 is
a normalized radial distance of the joint,
is
a normalized radial distance of the joint,
 is
a radial distance from head center to spin-mid.
is
a radial distance from head center to spin-mid.
As it is explained in
Skelton Tracking & Joints selection that the used joints are Hand
(Left & Right), Shoulder (Left & Right), Elbow (Left & Right),
Wrist (Left & Right) , also Spin Mid and Head Center which are used in
normalization .To identify the important features we selected a subset of
features from this set to enhance the recognition process by running an
automated feature selection process using filter feature selection , these
features as the difference in distance between Hand (Left & Right) and
Shoulder (Left & Right) .The total number of features are about 32 features
in spherical coordinates, they are listed as a following:
{r, Ø} of right,
left {hand, wrist, elbow, shoulder} position.
{r} of separation between
right and left {hand, wrist, ...}
The sign recognition goal
can only be achieved when the collected frames are coupled with an effective
features extraction followed by highly efficient classification. In the
proposed system the classifier takes the sequence of frames that formed the
single sign which is pre-segmented and classify each frame separately to
predicts the class that frame belongs to it. To achieve that we trained our
classifier on the individual frames of the training set (e.g. وفاة
""
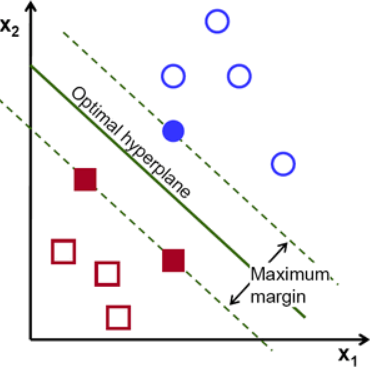
means "death") .There are two ways of solving the classification
problems: linear and nonlinear classifier as in Fig. 7. The frames
collection with defined features help to identify the classification problem as
linear or nonlinear classification [18], so we used machine learning algorithms
to build classifiers using SVM, ANN and KNN that are efficient to deal with
multiclass nonlinear classification problems and find the best matching class
given a list of classes.
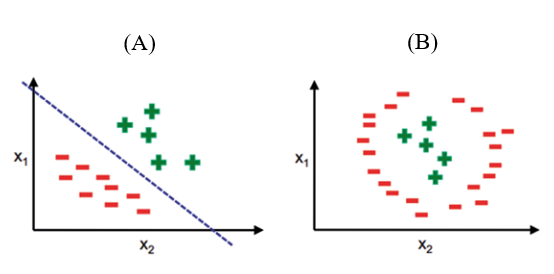
Fig. 7
Classification Types
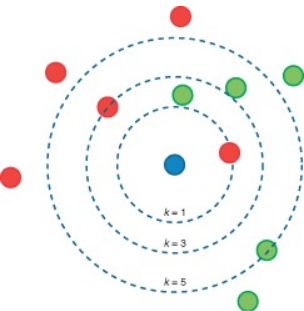
After the classification
phase, when the signer performs a sign, it enters to the system as a test
sequence then the classifier starts to classify each frame separately. The
result finally is selected by majority voting i.e. the classification with the
most frequent frames assigned to it. For example, if the classification results
of the test sequence were as in Fig.8, then the major index will be index
"1" so the translated sign will be sign with index=1 (اسهال
/dysentery).

Fig.8 Majority Voting
There are two types of gestures,
static gestures which do not require to any movement and dynamic gestures which
is in contrast to the static, they are composed of a series of static gestures
with some movements transition from one gesture to another, so they are
composed of a set of frames. In this case, we can apply direct matching
technique for recognition. So that, the captured sign can be directly compared
with the stored signs even the difference in sequences length. There are two
most widely used techniques for dynamic gesture recognition: (1) DTW (Dynamic
Time Warping) and (2) HMM (Hidden Markov Model). They are used for recognition
of similarities between two temporal sequences that do not need to be
synchronized in time according to their features [19]. We used DTW (Dynamic
Time Warping) in order to compare the captured gesture in real time with the
recorded dynamic gestures. The role of DTW is to find the optimal alignment between
two time-dependent sequences [20], in this research the sequence is composed from
the vector of the extracted features from the captured sign. The sequence is
warped automatically in real time with nonlinear form in order to match the one
of the stored sequences that represents the gestures data set [21].
Let we have two-time
dependent temporal sequences X: = (x1, x2, x3......xi) of length I and Y: = (y1,
y2, x3...yj) of length J and let Ƒ is a feature space where  ,
, Є Ƒ. The main objective of DTW is to compare these
sequences and analyze the similarities between them and finally find the
optimal alignment, so to compare x and y sequences we need to find a measure
called local cost or local distance as in Eq.4.
Є Ƒ. The main objective of DTW is to compare these
sequences and analyze the similarities between them and finally find the
optimal alignment, so to compare x and y sequences we need to find a measure
called local cost or local distance as in Eq.4.
C: Ƒ
X Ƒ
(3)
The value of C (x, y) must
be very small when x and y represents the same gesture else it must be large.
In this step we generate the local cost matrix with dimension of (I X J) as in
Fig.9. The cost of any position at the local cost matrix M (i, j) can be
determined as in Eq.5
M (i, j) = d (i, j) + min
{M (i − 1, j − 1), M (i − 1, j), M (i, j − 1)}.
(5)
The equation composed of two
parts the first part is the Euclidean distance d (i, j) between the feature
vectors of the sequences X and Y, the second part is the minimum cost of the adjacent
elements of the cost matrix up to that point [22].
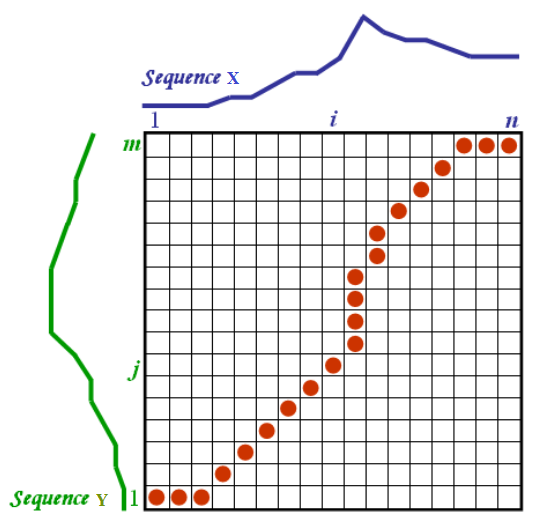
Fig.9 DTW (Dynamic Time Wrapping) cost matrix
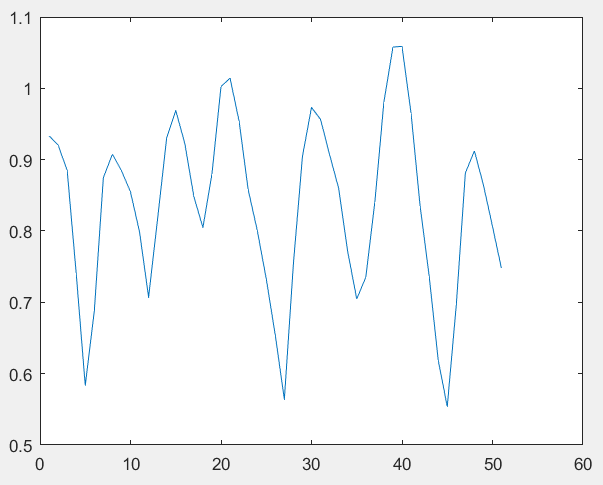
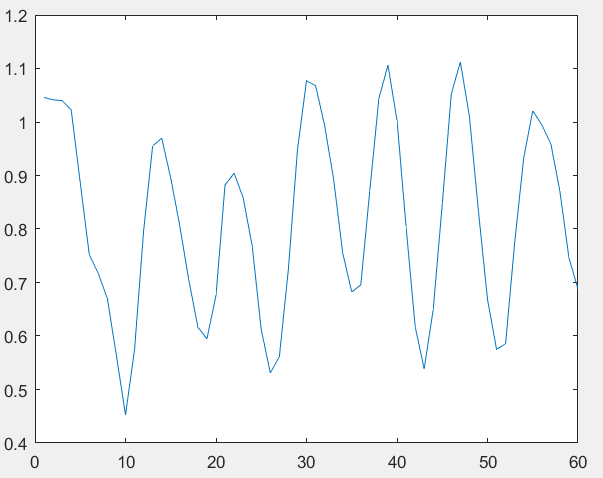
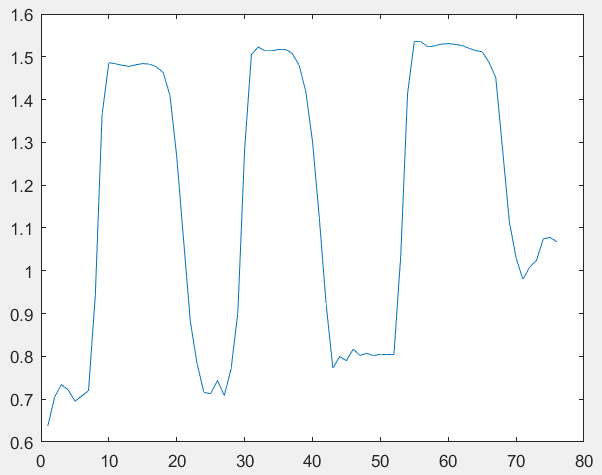
Fig.10 represents the
difference between the two signs "نزيف " or
"Bleeding" with ID=39 and "
اشعة "or
"X-Ray" with ID= 2, the graphs represents the orientation of
left-hand distance (LH. D), X-axis represents the number of frames and Y-axis
represents the coded values corresponded to each frame. The first two graph
represent the similarities between two samples for the same sign which
performed from two different users at different time and the third graph
represents a different sign and it is clear that it is completely different
from them.
|
|
|
|
|
a) LH. D feature for a sample of
sign "نزيف" or
"Bleeding" stored in training set
|
b) LH. D feature for a sample of
sign "نزيف" or
"Bleeding" stored in testing set
|
c) LH. D feature for a sample of
sign "اشعة" or "X-Ray"
stored in testing set
|
Fig.10 LH. D (Left hand -distance) feature over samples of
two different signs
Fig.11 represents the
original signal and warped signal for the left hand -distance feature for the
sign "نزيف
"
or
"Bleeding".
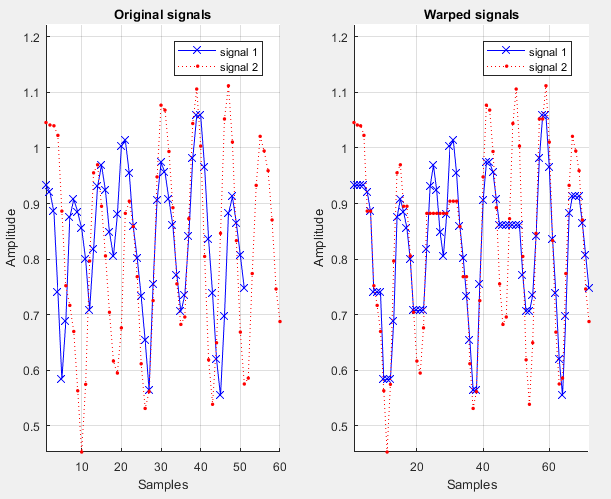
Fig.11 Original signal and warped signal for left-hand
distance (LH. D) over a sample for Sign_ID (39) نزيف "" or "Bleeding
".
Fig.12 represents the DTW
graph between the original signal and aligned sign for the sign "نزيف" or
"Bleeding".
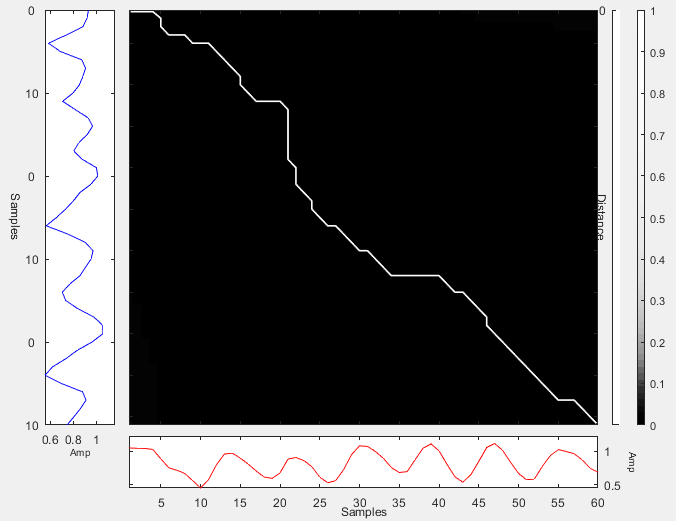
Fig.12 DTW graph between the original signal and aligned
sign for the sign "نزيف" or
"Bleeding".
For the purpose of studying
the performance of the proposed system, we developed a software application
based on the C# Language to interface with Kinect sensor and we used Microsoft
Kinect SDK.
For the purpose of studying
the performance of the proposed system, we recorded 40 different gestures in
medical field which are listed in Table 1 using Microsoft
Kinect V2. The data collected from two different volunteers in different
position and with different sizes.
Table 1 Medical Dataset
|
Index
|
Arabic
Sign
|
Meaning in English
|
Index
|
Arabic
Sign
|
Meaning in English
|
|
1
|
اسهال
|
Dysentery
|
22
|
نزيف
|
Bleeding
|
|
2
|
اشعة
|
X-Ray
|
23
|
وفاة
|
Death
|
|
3
|
استقبال
|
Reception
|
24
|
طبيب
عظام
|
Orthopedic doctor
|
|
4
|
رئتان
|
Two lungs
|
25
|
علاج
طبيعى
|
Physical therapy
|
|
5
|
كبد
|
liver
|
26
|
حقن
|
Injection
|
|
6
|
كلى
|
kidneys
|
27
|
زغللة
|
Blurred vision
|
|
7
|
معدة
|
stomach
|
28
|
سرطان
|
Cancer
|
|
8
|
امساك
|
Constipation
|
29
|
جهاز
قياس ضغط
|
Pressure measuring device
|
|
9
|
تحليل
|
analysis
|
30
|
صداع
|
A headache
|
|
10
|
تطعيم
|
Vaccination
|
31
|
صمم
|
Deafness
|
|
11
|
شلل
|
Paralysis
|
32
|
طبيب
اطفال
|
Pediatrician
|
|
12
|
طبيب
توليد
|
Obstetrician
|
33
|
طبيب
انف واذن
|
Doctor of nose and ear
|
|
13
|
تقيوء
|
Vomiting
|
34
|
طبيب
باطنة
|
Internist
|
|
14
|
تورم
|
Swelling
|
35
|
طبيب
عام
|
General Doctor
|
|
15
|
جرح
|
Wound
|
36
|
كسر
عظام
|
Broken bones
|
|
16
|
حامل
|
Pregnant
|
37
|
فيتامينات
|
Vitamins
|
|
17
|
حرارة
|
Fever
|
38
|
فشل
كلوى
|
Kidney failure
|
|
18
|
اوردة
|
Veins
|
39
|
قرحة
|
ulcer
|
|
19
|
حساسية
|
Allergic
|
40
|
قولون
|
The colon
|
|
20
|
مغص
|
Colic
|
41
|
مختبر
|
laboratory
|
|
21
|
انا
|
I
|
42
|
اشعر
|
Feel
|
For training phase, we
collected 20 samples from different 5 signers for each sign as a training set and
10 samples from different 2 signers as a testing set. Thus, making it a total
of 1260 samples which we divided into 840 samples for train set and 420 samples
for test set. All collected signs are dynamic (i.e.) multiple joints are moving
like hand, wrist, elbow and shoulder. For each sign we recorded a sequence of
skeleton data consisted of 20 joint positions per frame, which are formed from
x, y, and depth coordinates). Each incoming frame are preprocessed, the joints
of interest are selected and normalized relative to SpinMid joint as in sec.3.3.
Each sign's sequence contains on average (100 or 170) frames, making for around
36,456 frames in total for training set and 33, 995 frames for testing set.
Then the feature vector is formed by applying our mentioned technique and
appending the extracted features which are recorded for each frame. This is
done for both the training as well as the test dataset. We applied three
different classifiers in the classification phase (SVM, KNN and ANN) for
comparing the achieved accuracy of them. KNN classifier achieved the best
results in classification of separated frames. Fig.13 represents the
classifiers with the selected parameters which gave the best performance for
each one.
|
 RBF Kernel with gamma = 0.48 and C = 0.5. RBF Kernel with gamma = 0.48 and C = 0.5.
|
K = 1 with LinearNN search algorithm
|
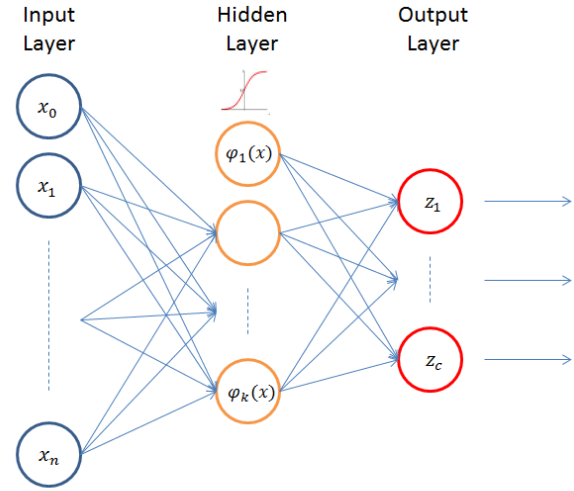
|
Input
layer contains 32 nodes equal to the frame features
|
Single
hidden layer with 6 neurons and sigmoid activation function
|
Output
layer with 40 neurons equal to the number of recognized signs
|
|
|
a) SVM
Classifier
|
b)
KNN Classifier
|
c)
Neural network
|
Fig. 13 Classifiers Parameters
There are two types of
recognition: (1) Model-Based matching such as machine learning techniques
(Classifiers as ANN, KNN, SVM, Decision Tree …etc.) and (2) Direct matching
techniques such as DTW (Dynamic Time Warping), HMM (Hidden Markov Model),
maximum correlation coefficient. In our research,
we tested the model by both techniques firstly with a set of classifiers and
compared the results of them, then the system was tested using DTW. The results
of our system are divided into two parts: the accuracy of recognition and the
time of response.
We have empirically calculated
the accuracy which is defined as the ratio of correctly recognized frames to
the total number of frames as in Eq.6

(6)
For example, if we have a
signIndex_3 with 150 frames to be classified that 30 frames classified as
signIndex_1, 20 frames classified as signIndex_2 and 100 frames classified as
signIndex_3 so after applying majority voting, the final predicted class will
be signIndex_3. In previous example, accuracy of frames classification equals  and after applying majority voting, the accuracy equals 100
%. We used KNN, SVM and ANN classifiers in the classification phase to compare
the accuracy of classification for the separated frames, we got the accuracy of
79 %, 66 % and 69 % respectively for frames classification (without majority
voting) in addition to 89 %, 79 % and 87 % (with majority voting) as it is
shown in Fig. 14. It is noticed that applying
the majority voting on the set of frames to get the sign meaning had enhanced
the accuracy. Fig. represents the
classifiers accuracy for each sign.
and after applying majority voting, the accuracy equals 100
%. We used KNN, SVM and ANN classifiers in the classification phase to compare
the accuracy of classification for the separated frames, we got the accuracy of
79 %, 66 % and 69 % respectively for frames classification (without majority
voting) in addition to 89 %, 79 % and 87 % (with majority voting) as it is
shown in Fig. 14. It is noticed that applying
the majority voting on the set of frames to get the sign meaning had enhanced
the accuracy. Fig. represents the
classifiers accuracy for each sign.
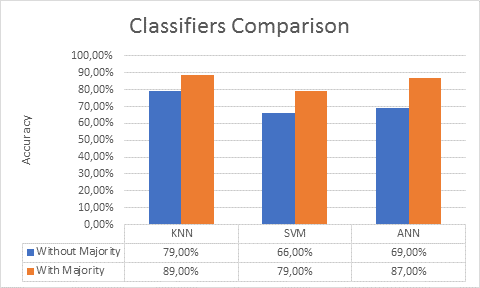
Fig. 14 Classifiers Accuracy Comparison
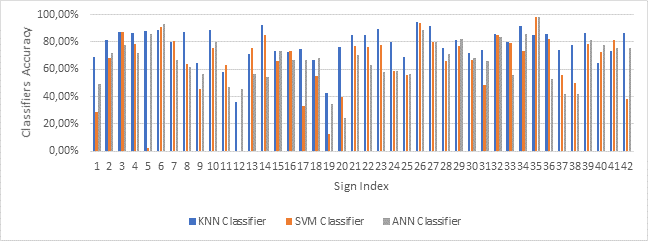
Fig. 15 Classifiers Accuracy for Each Sign
The response time means the
time which is required to recognize the captured sign in real time from the
time that Kinect camera captures the signer who is standing in from of its
camera till the process of gesture recognition is done.
To calculate the average
time which is taken by the proposed system to recognize the performed signs, we
calculate the time of response for each samples of the testing data set and
finally get the average of the calculated response time. Fig.16 represents the response time over the 10 samples of
the test-data set for sign ""
الرئتان or "Two-Lungs". It is clear
that the recognition process with SVM classifier has the least response time. Also Fig.17
represents the response time for the 42 signs using the different classifiers
over the test data set (10 sample per sign) .It is clear that the system takes
the least response time when we use SVM in classification step (7.2 Sec.) as in
average, then KNN (15.6 Sec.) finally ANN (23.2 Sec.)
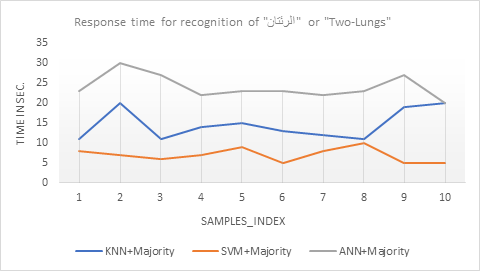
Fig.16 Response time for recognition of "الرئتان" or
"Two-Lungs"
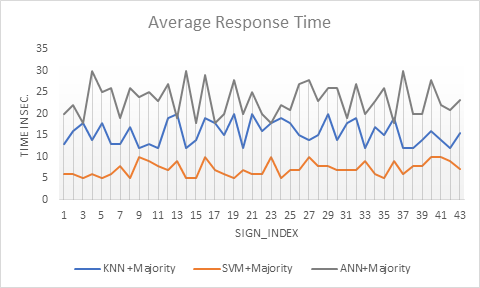
Fig.17 Average Response Time
We also tested the proposed
system using DTW algorithm and applied it on the same test data set to compare them
with the results of applying the different classifiers. The overall accuracy
that was achieved using DTW equals 77.85%. Fig.18 shows the results of applying
DTW on the test samples.
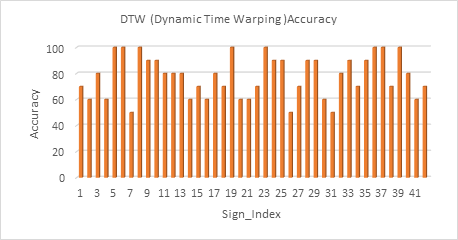
Fig. 18 DTW (Dynamic Time Warping) Accuracy
In this section, we
calculated the response time when the proposed system operates based on DTW
(Dynamic Time Warping). The test set was 10 samples for each sign (i.e.) 420
test samples, the average timing over this set was (16.38 Sec.) Fig.19
represents the average response time of DTW (Dynamic Time Warping) over the
test set.
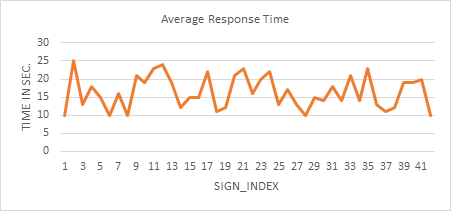
Fig. 19 DTW (Dynamic Time Warping) Response Time
Sign language segmentation
means dividing the continuous stream of signs into the basic units(words/signs)
by detecting the boundary of each sign i.e. the sign's start and end, major of
the direct segmentation methods depended on the detecting the minimal speed or
sign pauses ,it can be defined by the holding which occurs during performing
the sign, this holding occurs for a specific length of time in the transition
from one sign to another. To get the sign pauses the spatial parameters such as
x, y and z coordinates should be tracked in order to compute the pause length
between the signs.
The work mentioned above
assumes the signs to be pre-segmented that use single sign classifier. Single
sign classifier recognizes sign by sign not continuous sentences. If we deal
with real-time recognition, we should use automatic segmentation method to
separate between consequent signs. Here, we introduce a simple method for
segmentation depends on the motion speed during performing the continuous
signs. It is noticeable that the motion speed is changed during performing the
signs, when the transition from one sign to another occurred the motion speed
is slowed down, so we can segment the continuous signs if we can detect the
slowing down periods, the following steps represents the segmentation process:
1.
Capture the data of the joints as a (3-D)
three-dimensional position in (x, y, z) using Kinect and expresses these
coordinated in meters.
2.
Compute the selected features and record them as
frames, the dynamic of each joint is computed through the variation of position
over the time during performing the signs.
3.
Compute the distance by calculating the
difference between each frame as in Eq.7
D=  ,
,
(7)
4.
Calculate the motion speed by multiplying the
sampling rate in calculated distance as in Eq.8.

(8)
Where,
 is the motion speed,
is the motion speed,
 is calculated distance and
is calculated distance and
 is sampling rate.
is sampling rate.
5. If we detect a sequence of 20 or more observations with a speed less
than or equal 5 m/s, then we will consider these observations as segmenter
between two words. The start of the detected observations is considered as the end
of the previous sign and the end of detected observation is considered as start
of next sign.
The joints that are tracked
and used in the minimal speed detection were left and right (Hand, Shoulder,
Wrist, Elbow), because they are the main parts used in performing the signs,
there is no point in tracking other joints because they are stationary during
the sign execution.
We explained here two
continuous sentences and their segmentation process: the first sentence is اشعة
الرئتان" "
or "Lungs X-Ray" and the second sentence is
For the sentence "اشعة
الرئتان"
or "Lungs X-Ray" which consists of two words, Fig.20 represents the sentence
performance over the time, Fig.21 represents the sentence segmentation based on
the motion speed. As it is showed in the Fig. 25 there is slowing down period
occurred between the two signs during the transition from the first word "اشعة / X-Ray" and
the second word "الرئتان/ Lungs" this
period occurred from frame number 80 to 140 (i.e.) 60 frames this it means that
the slowing down period was (2 sec.) because of the Kinect frame rate is 30
frame /sec. So, the frame number 79 is the end of the word "اشعة
/
X-Ray" and the frame number 141 is the start of the word "الرئتان/ Lungs".
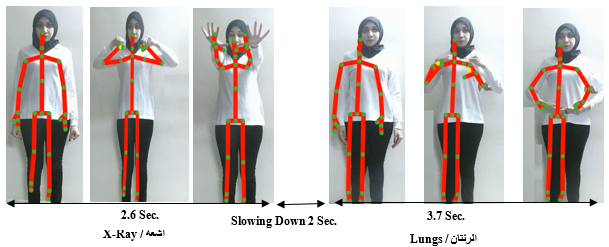
Fig. 20 Performance of Two Words Sentence "اشعة
الرئتان" or "Lungs X-Ray"
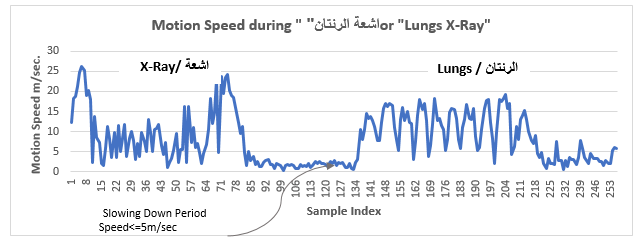
Fig. 21 Segmentation for Two words Sentence "الرئتان" or "Lungs X-Ray"
For the sentence "
انا اشعر بمغص" or "I am
feeling colic " which consists of three words, Fig.22 represents the
sentence performance over the time, Also, Fig.23 represents the sentence
segmentation based on the motion speed. As it is showed in Fig.23 there are two
slowing down periods between the three words. The first period starts from 30
to 69 (i.e.) 39 frames (1.3 sec), the second period starts from 91to 123 (i.e.)
32 frames (1.06 sec.).
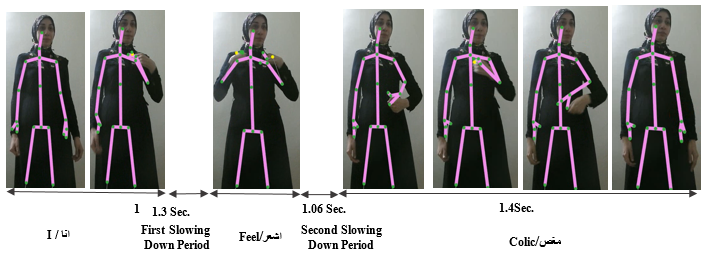
Fig. 22. Performance of Third Words Sentence "انا
اشعر بمغص"
or " I am feeling colic "
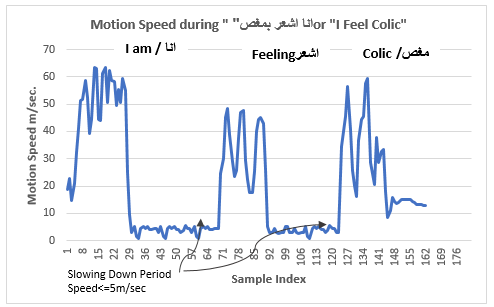
Fig. 23. Segmentation of Three Words Sentence "انا
اشعر بمغص" or "I feel colic "
We tested the segmentation
on over 40 sentences with different lengths composed from the Arabic signs data
set which are listed in Table 5, the test focused on the ability of the
segmentation method to segment the sentences which were composed from several
signs correctly in real time. The result of the segmentation was satisfied and
reach over 91 %, also we got the results of the recognition for the signs that
were composed the tested sentences and the recognition reached 86% using the
model based on KNN.
The absence of comparative studies
and a benchmark dataset on ArSLR makes it hard to make a comparative study
using existing ArSL research. However, visible comparison was compared with CHALEARN
dataset which is available on [23]. The ChaLearn 2013 dataset contains 20 Italian gestures
which were recorded using Kinect, it contains (Both depth and RGB images for
face and body, skeleton data, Joint orientation and position also audio
sources), it includes 15,000 samples from several signers. The result of our
comparison is listed in Table 2.
Table 2 Comparative Study
Results
|
Dataset
|
Number of Signers
|
Number of Gestures
|
Accuracy [54]
|
Accuracy
[55]
|
Accuracy
[26]
|
Proposed Model
|
|
CHALEARN
2013
|
27
|
20
|
76%
7 joints were used as features
set
|
85%
Skeleton data
|
63.34% (4 joints)
|
87%
|
In this paper, an Arabic
sign recognition system using Microsoft Kinect is proposed. The proposed system
is developed and applied on medical words. Captured user’s position and size
are normalized to solve the variation problem in collected frames. Feature
selection method is applied on collected frames and selected 32 features which
are the most effective features. We applied classification algorithms like KNN,
ANN and SVM to recognize captured signs. Segmentation method using motion speed
is applied to segment a sequence of words with accurate manner. System
performance is analyzed using 40 Arabic words from medical field. The system
was trained on 1260 samples and tested on 840 samples, the experimental results
showed that the proposed system recognition rate reached 79 % for KNN
classifier and enhanced using majority voting to reach 89 %. The segmentation
accuracy reached 91 %. The proposed system is dynamic and robust, it can deal
with any word in Arabic language depends on body motion.
For further research, the
proposed system can be enhanced by applying other techniques in the recognition
phase like dynamic time wrapping (DTW) that compare the sequence of each frames
in training dataset with frames in testing data set. Segmentation method can be
enhanced to be more accurate. Also, conducting more experiments with other
words from different fields will be enhance the proposed system and make it
widely used.
This research was
supported and revised by my supervisors Dr. Alaa Hamouda and Prof.Dr. Ali
Rashed. We thank the reviewers for their effort in reviewing and for their insights.
1.
Al-Jarrah, Omar, and Faruq A. Al-Omari.
"Improving gesture recognition in the Arabic sign language using texture
analysis." Applied Artificial Intelligence 21.1 (2007): 11-33.
2.
Maraqa, Manar, and Raed Abu-Zaiter.
"Recognition of Arabic Sign Language (ArSL) using recurrent neural
networks." Applications of Digital Information and Web Technologies,
2008. ICADIWT 2008. First International Conference on the. IEEE, 2008.
3.
El-Bendary, Nashwa, et al. "ArSLAT: Arabic
sign language alphabets translator." Computer Information Systems and
Industrial Management Applications (CISIM), 2010 International Conference on.
IEEE, 2010.
4.
Hemayed, Elsayed E., and Allam S. Hassanien.
"Edge-based recognizer for Arabic sign language alphabet (ArS2V-Arabic
sign to voice)." Computer Engineering Conference (ICENCO), 2010
International. IEEE, 2010.
5.
2011 A survey on sign language recognition.
6.
Azad, Reza, Babak Azad, and Iman Tavakoli
Kazerooni. "Real-time and robust method for hand gesture recognition
system based on cross-correlation coefficient." arXiv preprint
arXiv:1408.1759 (2014).
7.
Naoum, Reyadh, Hussein H. Owaied, and Shaimaa
Joudeh. "Development of a new arabic sign language recognition using
k-nearest neighbor algorithm." (2012).
8.
Elons, A. Samir, Magdy Abull-ela, and Mohamed
Fahmy Tolba. "Neutralizing lighting non-homogeneity and background size in
PCNN image signature for Arabic Sign Language recognition." Neural
Computing and Applications 22.1 (2013): 47-53.
9.
SamirElons, Ahmed, Magdy Abull-ela, and Mohamed
F. Tolba. "Pulse-coupled neural network feature generation model for
Arabic sign language recognition." IET Image Processing 7.9
(2013): 829-836.
10. Mohandes, Mohamed, Mohamed Deriche, and Junzhao Liu.
"Image-based and sensor-based approaches to Arabic sign language
recognition." IEEE transactions on human-machine systems 44.4
(2014): 551-557.
11.
Almasre, Miada A., and Hana Al-Nuaim. "A
Real-Time Letter Recognition Model for Arabic Sign Language Using Kinect and
Leap Motion Controller v2." International Journal of Advanced
Engineering, Management and Science (IJAEMS) 2.5 (2016).
12. ElBadawy, Menna, et al. "A proposed hybrid sensor architecture
for arabic sign language recognition." Intelligent Systems' 2014.
Springer, Cham, 2015. 721-730.
13. Aliyu, S., et al. "Arabie sign language recognition using the
Microsoft Kinect." Systems, Signals & Devices (SSD), 2016 13th
International Multi-Conference on. IEEE, 2016.
14. Jmaa, Ahmed Ben, et al. "Arabic sign language recognition based
on HOG descriptor." Eighth International Conference on Graphic and
Image Processing (ICGIP 2016). Vol. 10225. International Society for Optics and
Photonics, 2017.
15. Almasre, Miada Ahmmed, and Hana A. Al-Nuaim. "Using the
Hausdorff Algorithm to Enhance Kinect’s Recognition of Arabic Sign Language Gestures." International
Journal of Computer Science and Security (IJCSS) 7.1 (2017): 2.
16. Mohandes, Mohamed, Mohamed Abdelouaheb Deriche, and Salihu Oladimeji
Aliyu. "Arabic sign language recognition using multi-sensor data
fusion." U.S. Patent No. 9,672,418. 6 Jun. 2017.
17. Almasre, Miada A., and Hana Al-Nuaim. "Comparison of Four SVM
Classifiers Used with Depth Sensors to Recognize Arabic Sign Language
Words." Computers 6.2 (2017): 20.
18. Premaratne, Prashan. "Effective hand gesture classification
approaches." Human Computer Interaction Using Hand Gestures.
Springer, Singapore, 2014. 105-143.
19. Gani, Eriglen, and Alda Kika. "Albanian Dynamic Dactyls
Recognition using Kinect Technology and DTW." Proceedings of the 8th
Balkan Conference in Informatics. ACM, 2017.
20. Lekova, Anna, D. Ryan, and Reggie Davidrajuh. "Fingers and
Gesture Recognition with Kinect v2 Sensor." Information Technologies
and Control 14.3 (2016): 24-30
21. Ahmed, Washef, Kunal Chanda, and Soma Mitra. "Vision based hand
gesture recognition using dynamic time warping for Indian sign
language." Information Science (ICIS), International Conference on.
IEEE, 2016.
22. Bautista, Miguel Angel, et al. "Probability-based dynamic time
warping for gesture recognition on RGB-D data." Advances in Depth
Image Analysis and Applications. Springer, Berlin, Heidelberg, 2013. 126-135
23. https://www.kaggle.com/c/multi-modal-gesture-recognition
24. Escobedo-Cardenas E,
Camara-Chavez G (2015) A robust gesture recognition using hand local data and
skeleton trajectory. In: International Conference on Image Processing, pp
1240–1244
25. Chen, Xi, and Markus
Koskela. "Using appearance-based hand features for dynamic rgb-d gesture
recognition." Pattern Recognition (ICPR), 2014 22nd International
Conference on. IEEE, 2014.
26. Kumar, Pradeep, et al.
"A position and rotation invariant framework for sign language recognition
(SLR) using Kinect." Multimedia Tools and Applications 77.7
(2018): 8823-8846.
