The use of physically correct methods for
the calculation of illumination, simulating the propagation of light and its
interaction with the scene objects, is becoming increasingly used in various
fields of science and industry. In the classical usage of these methods for
realistic images generation [1] or for designing of various optical and
lighting devices [2], the results of optical simulation are usually presented
in the form of graphs, tables or images of the distribution of such light
characteristics as luminance, illuminance or intensity registered on virtual
radiation receivers. This form of results representation is sufficient when we are
interested in the simulation result only. However, in some cases, we also need
to know how it was obtained, or what had the greatest impact on the result. For
example, during simulation the luminance distribution on the surface of the
phone keyboard backlight system, the developer needs to understand how the
light from the light sources passes through the entire illumination system and
goes through the upper edge of the key (Fig. 1). Another relevant example is
the analysis of stray light in a lens objective. The developer needs to
understand which surface of the lens and which lens creates a highlight on the
image. To obtain comprehensive information on the light propagation in the
optical system, it is convenient to visualize the trajectories of the simulated
rays. A visual representation of the trajectories of light rays in the optical
system is also useful for a software developer, as a means of debugging and
optimizing algorithms [3].
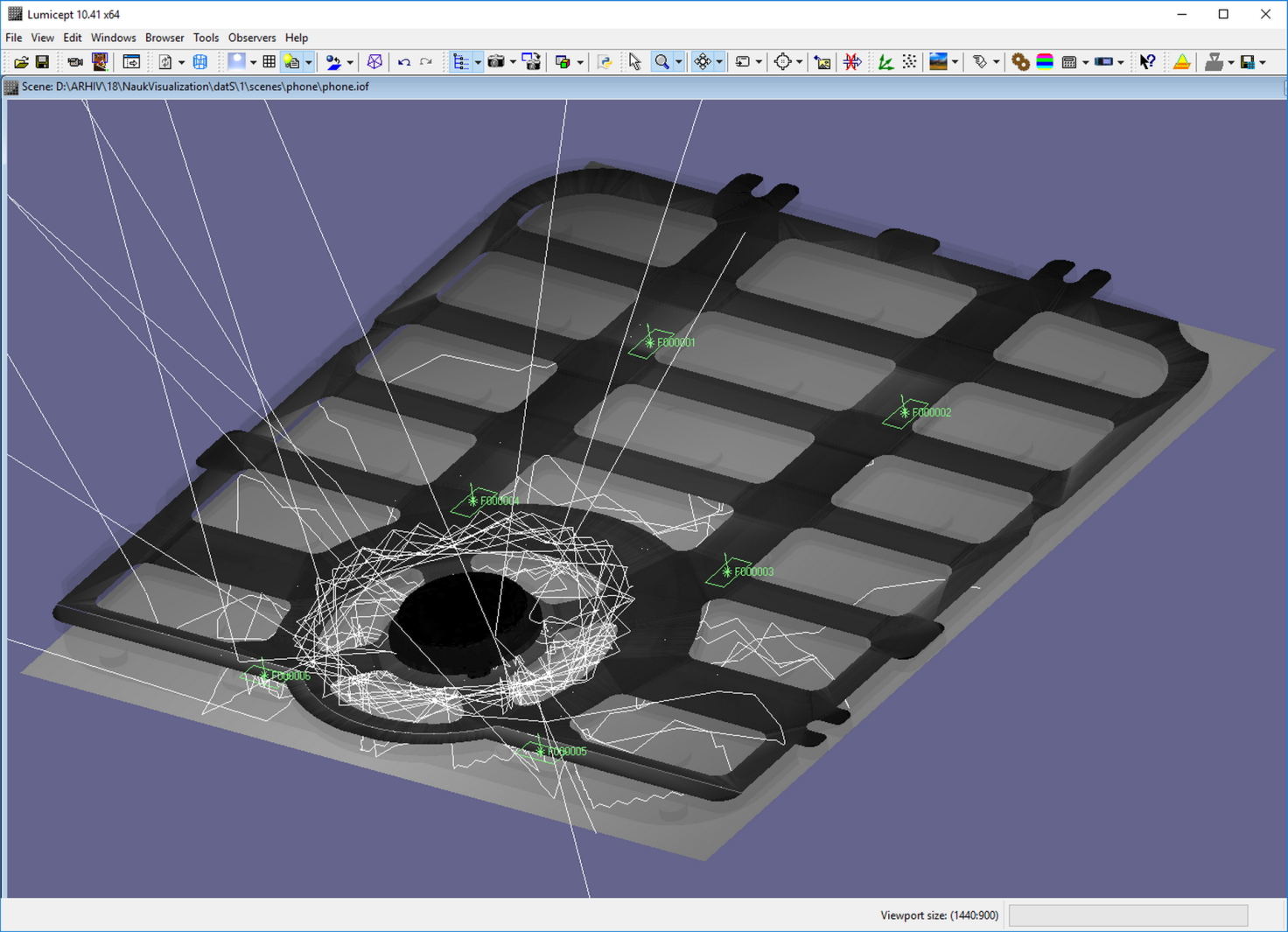
Fig. 1. Rays hit the center button
Currently, the generation of realistic
images based on physically correct lighting simulation is used in all new
areas. For example, the use of physically correct synthesized images and video
sequences in the training systems of artificial intelligence [4] [5] [6] is
promising. The correctness of the resulting images is crucial in all these applications.
Otherwise, the goal will not be achieved, and the intelligent system will be
trained incorrectly. However, this physical correctness may be impaired due to
errors in the simulation program or user errors when describing scenes, the
geometry of objects, optical properties of objects. Visualization of the
propagation of light rays is one of the most effective means for detecting and
analyzing such errors [3], [7].
For all these reasons, the visualization of
the trajectories of light rays has actually become the basic functionality of
modern optical simulation systems. Initially, a visual representation of the
ray trajectories was implemented in systems for the synthesis of realistic
images and optical simulation, developed at Keldysh Institute of Applied
Mathematics RAS (KIAM) [7-9], in the late 90s. However, the use of these
systems for solving complex problems of designing modern optical devices
revealed certain disadvantages of the implemented ray visualization algorithms,
such as:
•
Slow raytracing;
•
The impossibility of storing the rays obtained
by tracing for subsequent detailed analysis;
•
Absence of possibility to visualize rays paths
only for a part of the scene – for selected light sources, geometrical objects
and virtual measuring devices;
•
Absence of integration with computer-aided
design (CAD) systems.
The slowing down of the ray tracing process
was caused by the visualization technology used, since one of the requirements
for the previous implementation was the sequential visualization of the ray
traced segments one by one. In this technology, the algorithm could use only
one thread for calculations. Using OpenGL to render segments in this mode is
also inefficient. As a result, when simulating on a typical modern computer (Intel
Core i7-4770 3.4GHz 32GB RAM), the speed of direct Monte Carlo ray tracing for
a typical scene is ~ 1.2 million rays per second, while the visualization of
traced rays occurs at a speed of only ~ 1300 rays per second. It was senseless
to add ray storing to the existing algorithm at such a speed of tracing.
Removing these limitations actually required redesigning the entire ray
visualization module. The main requirements for the development of a new system
were the effective use of multi-core computers both for ray tracing and for
analyzing the simulation results, as well as the integration with CATIA CAD.
To meet the new requirements, we have
developed new algorithms that efficiently use multi-core processors. A new
module for visualization of light propagation was implemented in the basic standalone
system Lumicept and in the corresponding system integrated into CATIA. The
first results were reported at conferences [10] and [11].
Optical simulation in CATIA CAD system has
certain specifics related to the representation of geometric objects in the
scene. The scene in the CATIA system document contains a large number of
geometrical objects and light sources, not all of which are of interest to the
user in this simulation and visualization of the rays. This may be caused by
the user's desire to exclude auxiliary objects from modeling or, on the
contrary, to include in this simulation only a part of the scene objects
forming a certain light beam, or to use only that part of the scene where the
user assumes certain problems. For these reasons, appropriate simulation in
CATIA begins with the selection of objects for the simulation.
The selection of objects for simulation is
in fact the creation of a new scene from objects that already exist. The
corresponding dialogues for the subsystem integrated in CATIA are shown in Fig.
2. In the left part of Fig. 2 shows a dialog in which the objects selected for simulation
are displayed. The objects themselves can be selected either directly in the
scene rendering window, or in the scene tree view as it is shown in the
right-hand side of Fig. 2.
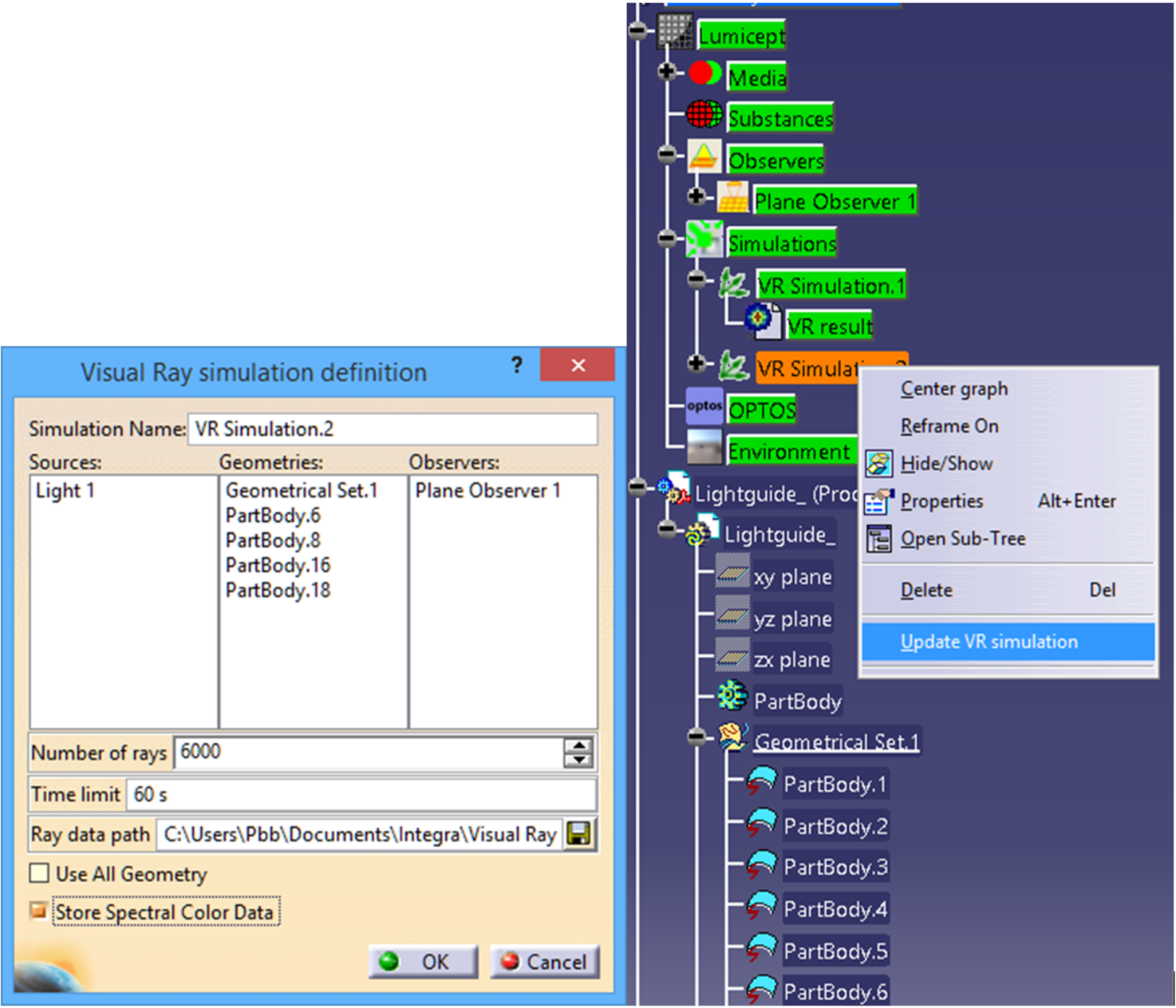
Fig. 2. Objects used for light
propagation visualization, scene objects tree and start of the simulation
In the
dialog, it is also possible to specify the saving of data in a spectral form.
Also the user can set the path for saving the simulation results, the number of
rays saved and the time limit for the simulation. After closing the dialog, the
ordered simulation is displayed in the scene tree and can be started as shown
on the right side of Fig. 2, using the drop-down dialog. The user can create an
unlimited number of such simulations for different purposes. The dialogue shown
in Fig. 2 was implemented, of course, using the appropriate CATIA tools for
user interface creation.
The
simulation itself is performed in the special module named I2 Server which is
built basing on the Lumicept system developed in KIAM. Interrogation scheme of
CATIA system and I2 Server module is represented in the upper part of Fig. 3.
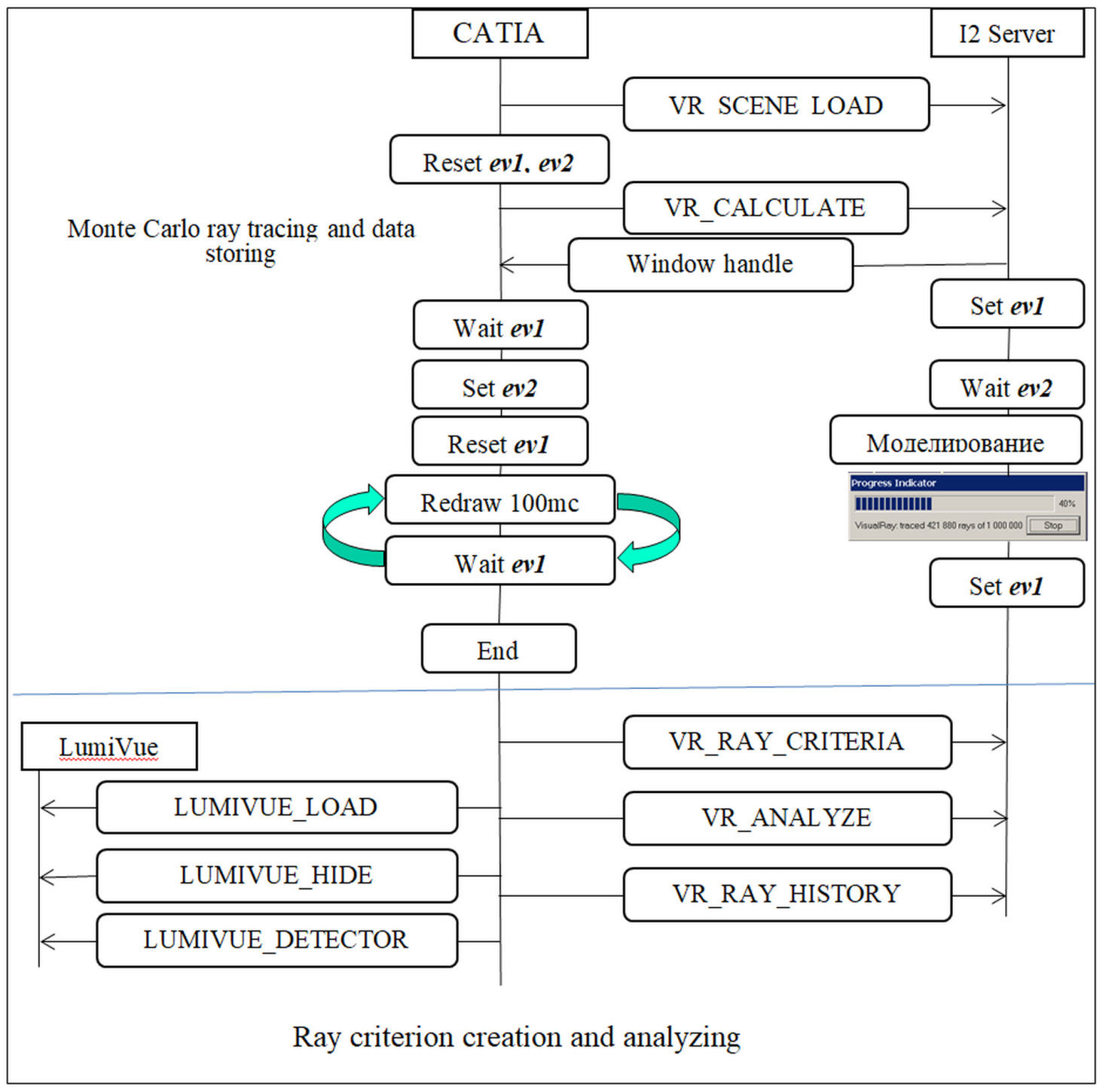
Fig. 3. Scheme of interrogation of
CATIA with I2 Server and LumiVue in the light propagation visualization
subsystem
CATIA creates
the scene description in the binary format of Lumicept system, stores it to
disk and sends the VR_SCENE_LOAD (scene loading) command to I2 Server, and then
VR_CALCULATE command (Monte Carlo raytracing with storing rays to a file for
visualization). Additional parameters (path to the saved scene data, path to
the file for rays storing, time limit, number of rays, etc.) are sent using the
shared memory. Schemes of execution of different commands in I2 Server are
similar to each other. Here there is a detailed description for VR_CALCULATE
command execution because it is the most complicated command.
1.
CATIA resets the ev1 and ev2
events, sends the VR_CALCULATE message (using Windows messages
system) and waits for setting of ev1 event.
2.
I2_Server after receiving VR_CALCULATE
message takes from shared memory path to the file, loads the scene from it,
puts its own window descriptor to shared memory, sets the ev1 event
and waits for ev2 event setting.
3.
CATIA takes from shared memory the window
descriptor, resets the ev1 event and sets the ev2
event.
4.
After ev2 event is set I2 Server executes
the simulation command and after its completion sets the ev1
event. During simulation the progress bar shows the progress of the command
execution: ratio of number of simulated rays to number of totally required rays
in percent. The simulation results are stored to disk by I2 Server.
5.
CATIA, while waiting for setting ev1
event, does redraw of its own window each 100 milliseconds, and simultaneously
makes I2 Server window active and topmost. After ev1 event is set
CATIA updates data and scene tree in its own document corresponding to the
scene which was stored to disk by I2 Server.
The algorithm for storing the rays obtained
by tracing for one portion of the rays is shown in Fig. 4. In fact, this is the
same Monte Carlo ray tracing, which is used for the global illumination calculation.
Rays built with a Monte Carlo tracing will be saved if the corresponding
simulation parameter is set. In fact, the calculation kernel provides simultaneous
computation of global illumination, storing the results in the form of
irradiance maps or illuminance values on virtual measuring instruments, and the
ray storing. The illumination values on the virtual measuring devices are
obtained as a result of the registration of the rays falling on them. It is
produced only for virtual instruments specified in the dialog in fig. 2. The
results of the registration of the rays are stored in separate files for
further analysis during the visualization of the rays. With multi-threaded ray
tracing, the algorithm shown in Fig. 4, works almost independently in each
computational thread for each computed portion of the rays. The only module in
this algorithm that needs synchronization is the recording of portions of rays
on a disk, since all rays are written to one file. This synchronization is
provided by the usual critical section (CRITICAL_SECTION). It is clear that the
algorithm will remain efficient as long as the recording of portions on the
disk will be faster than the computational threads will produce them. Thus, a
critical point in this formally simple algorithm is the efficient compression
of the portions of the rays obtained by Monte-Carlo tracing.
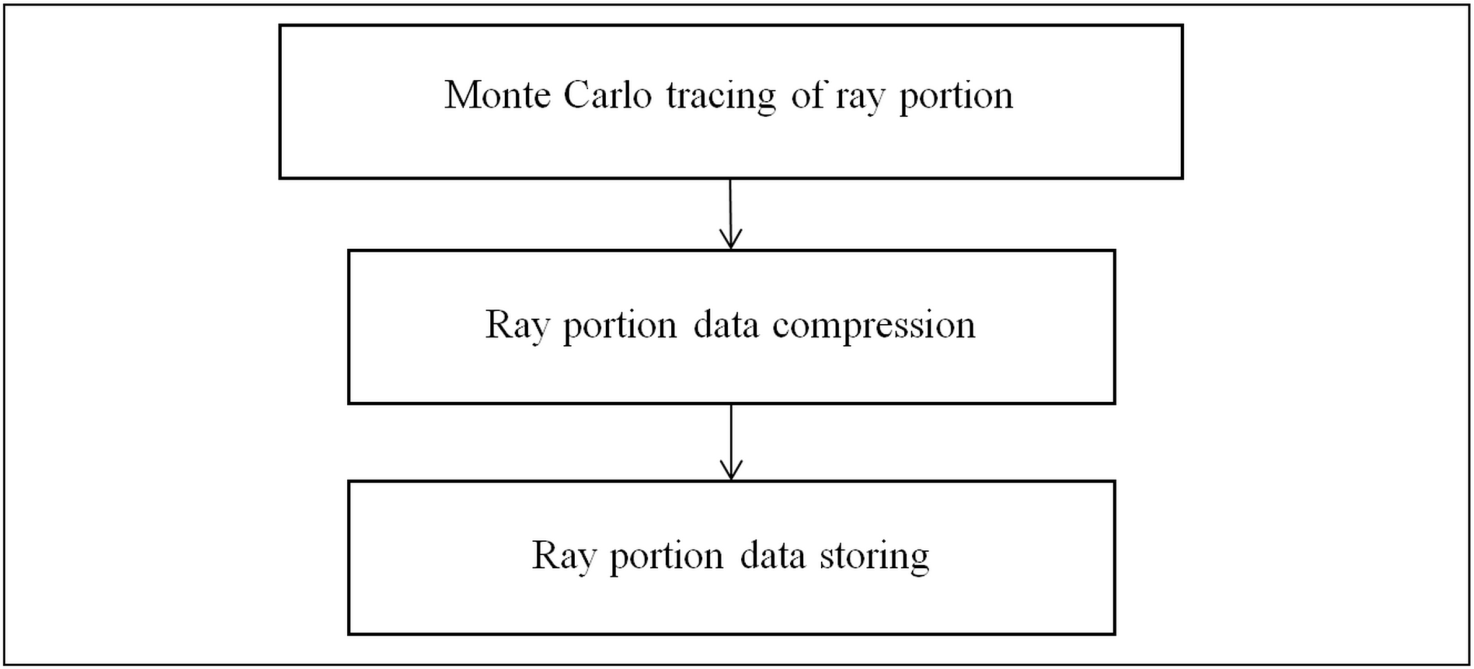
Fig. 4. Algorithm of storing rays during Monte Carlo raytracing
At first it is needed
to minimize information amount for storing, but at the same time information
should be sufficient for further analysis. For each ray segment the following information
is being stored:
1.
Light source index (short);
2.
Object index (short);
3.
Triangle index (int). It is used for finding out
the ray propagation medium and surface properties from both sides of the
surface;
4.
Coordinates of starting point for the first
(from light source) ray segment and the end point of the previous segment for
the rest segments (float[3]);
5.
Surface normal in the segment starting point (short[3]);
6.
Event type in the end point of the segment
(int);
7.
Index of the first descriptor of segment
interrogation with virtual measuring device (int, -1 if there were no such
event);
8.
Number of descriptors related to this segment
(WORD).
Totally 36 bytes
are used for recording a one ray segment. For each ray one more segment is
recorded than they really exist. The last segment is used to record the
coordinates of the end point of the previous segment, as well as event type and
direction in case if the ray leaves the scene. To describe the type of event at
the end point of the segment, int is used, since it can contain several events,
and a separate bit is used for each event.
Since simulation
can occur both in RGB and in spectral color space, the length of the array used
to store the color of a ray segment depends on the color space used in the
simulation. Therefore, the saving of the color of the ray segment occurs in a
special array of short type elements. For the ray color in our Monte Carlo ray
tracing, normalized values are always used, i.e. the sum of the
color components is equal to 1, therefore the accuracy provided by the short
type (1.0 / 65535 = ~ 1.5e-5) is quite enough for our ray visualization task.
The index of the first color element in an array of colors for a given segment
is determined in a natural way as the product of the segment index and the
number of values that determine the color. These are three for simulation
in RGB space, and the number of wavelengths during spectral simulation.
Similarly, an
array of corresponding descriptors is used to describe the interaction of a ray
with virtual measuring instruments. The descriptor includes the following:
1.
Index of virtual measuring device with which
there was an interrogation at the specified ray segment (short);
2.
Index or the virtual measuring device cell where
the interrogation was registered (WORD[2]);
3.
Cosine of the angle between the ray and
direction of the virtual measuring device (short);
4.
Coordinates of the intersection point of the ray
and virtual measuring device (or projection of the intersection point of ray
and surface to the device) in the relative coordinates of the virtual detector
(WORD[2]);
5.
Was the event registered (bool).
The compression itself in our algorithm is
implemented using the shareware library for data compression zlib [12]. Each of
the arrays – rays segments, events registered at virtual measuring devices and
color components are compressed separately.
When saving to
the file for each portion are recorded:
1. Compression flag (for the purpose of debugging there is kept a
possibility of saving non-compressed portion);
2. Compressed segments array and its length;
3. Compressed array of events registered at virtual measuring devices
and its length (if present);
4. Number of color channels used for simulation – 3 for RGB simulation
and number of wavelengths for spectral simulation. The system allows to
continue calculation and saving rays to the same file for new rays portions even
after changing color space;
5. Compressed array of color component values and its length.
This
information is sufficient to recover all the rays received by Monte-Carlo ray
tracing and to analyze them. Analysis allows you to select by a given
criterion, visualize the selected rays in the window along with the scene
geometry using natural or artificial colors, display all parameters of this
segment in the dialog box for the corresponding user request. The
implementation of this procedure allowed us to trace and save the rays at a
speed of ~ 396720 rays per second instead of ~ 1266 rays per second for the old
algorithm (Intel Core i7-4770 3.4GHz 32GB, 4 cores, 8 threads). That is an
acceleration of ~ 300 times was obtained for ray storing.
The resulting simulation file is in fact a
three-dimensional ray map. These ray maps are used to quickly analyze the light
characteristics of a radiation receiver with varying parameters, to study the
features of light propagation in the scene, etc. One of the most important
examples of the use of these maps is the visualization of the propagation of
light rays in the design of complex optical systems [13]. To study the details
of the propagation of light and obtain various statistical characteristics in
some practical cases, three-dimensional maps of very large size are used. They
can contain tens of millions of rays and hundreds of millions of segments,
along with a large amount of information about optical events that have taken
place along the ray trajectory. File sizes for storing these maps can reach
several gigabytes.
When visualizing the propagation of light
rays, a typical task that is crucial from the point of view of processing time
is the selection for the further visualization of the ray trajectories that
satisfy the given criterion. The criteria for this selection are the most
diverse and quite complex. The following typical events occurring along the ray
trajectory, which may be of interest in the study of the optical system [9]:
•
A ray was emitted by a given light source;
•
A ray was intersected or not intersected with specified
object face (triangle);
•
A ray was intersected with specified part of a geometrical
object of an optical system and a specific optical transformation took place;
•
There was registered an intersection of ray with
specified virtual measuring device;
•
A ray was intersected with a surface which has
specified optical parameters and a specific optical transformation took place;
•
A ray had undergone specified optical
transformation (specular or diffuse reflection, absorption etc) at one of the
optical system objects;
•
A ray was registered at the specified part of
the virtual measuring device.
In the general case, a logical expression
is constructed from these elementary events, represented as a tree of events shown
in Fig. 6, which is the ray selection criterion for visualization. The
expression is constructed using the logical intersection ( ), union (
), union ( ) and logical negation (
) and logical negation ( ). For each given
optical conversion, you can choose which transformations took place and how
many times. For each optical transformation one can specify which transformations
took place and how many times.
). For each given
optical conversion, you can choose which transformations took place and how
many times. For each optical transformation one can specify which transformations
took place and how many times.
For comfortable work it is needed to
minimize the response time of the system after any changes of ray selection
criterion. It is desirable to provide the real-time system response when it is
possible. For three-dimensional ray maps of a huge size it is desirable that
the response time does not exceed at least several minutes. Since practically
all computers currently used are multi-core, it seems appropriate to
parallelize the process of analyzing three-dimensional ray maps.
The subsystem of
analysis of rays obtained with Monte Carlo ray tracing includes the following
components:
1.
User interface which provides rays selection criteria
creation and control of ray visualization parameters;
2.
Reading of a file with stored data and
selection of rays satisfying to the created criterion;
3.
Visualization of selected rays and user
interface for showing the information along the selected rays – coordinates of
the start and the end of each segment, segment colors (RGB and spectral), name
of the ray propagation medium for specified segment and its basic parameters,
etc.
The user interface of the ray visualization
subsystem is shown in Fig. 5. The left part shows the interface implemented in
the CATIA system, and the right part shows the corresponding interface
implemented in the Lumicept system. Some difference in the user interface is
due to the use of different libraries (RADE in CATIA and QT in Lumicept), and
the use of different objects. In CATIA, one can use the faces of objects,
including curvilinear, in the criteria for selecting rays, while in the
Lumicept system there is no such concept. CATIA also has the ability to use as
a criterion the ray intersection of a virtual measuring instrument detector
area, which is currently not implemented in the Lumicept system.
An additional, more complex criterion can
be constructed using the visualization criterion editor, originally implemented
in the basic Lumicept system. In CATIA, the implementation of this dialogue is
provided through the I2 Server according to the scheme shown in Fig. 3 using
the VR_RAY_CRITERIA command. The user interface of the complex ray selection
criterion is shown in Fig. 6. Finally, the criterion combines all the events specified
in dialogues shown in Figures 5 and 6.
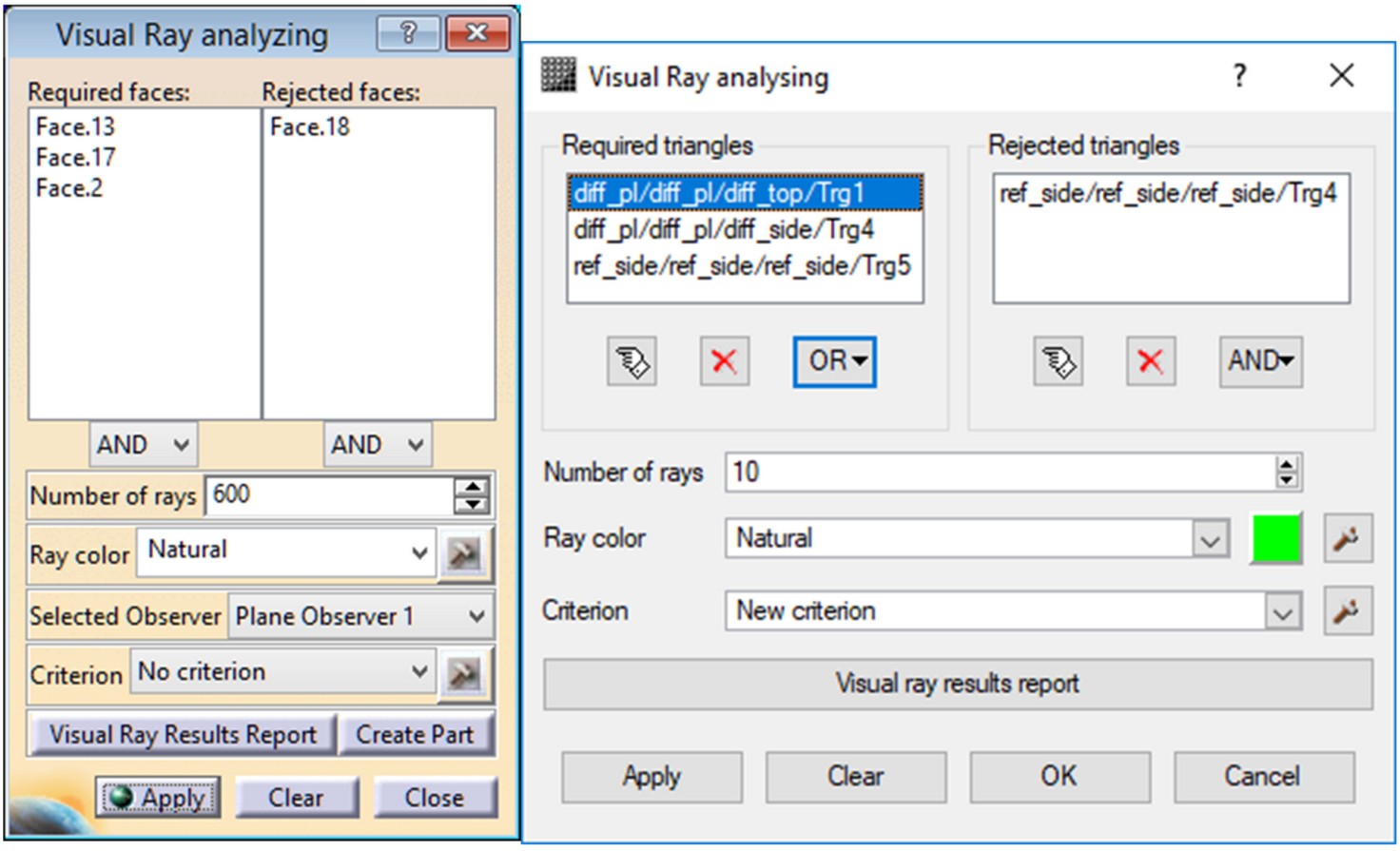
Fig. 5. User interface of ray visualization subsystem.
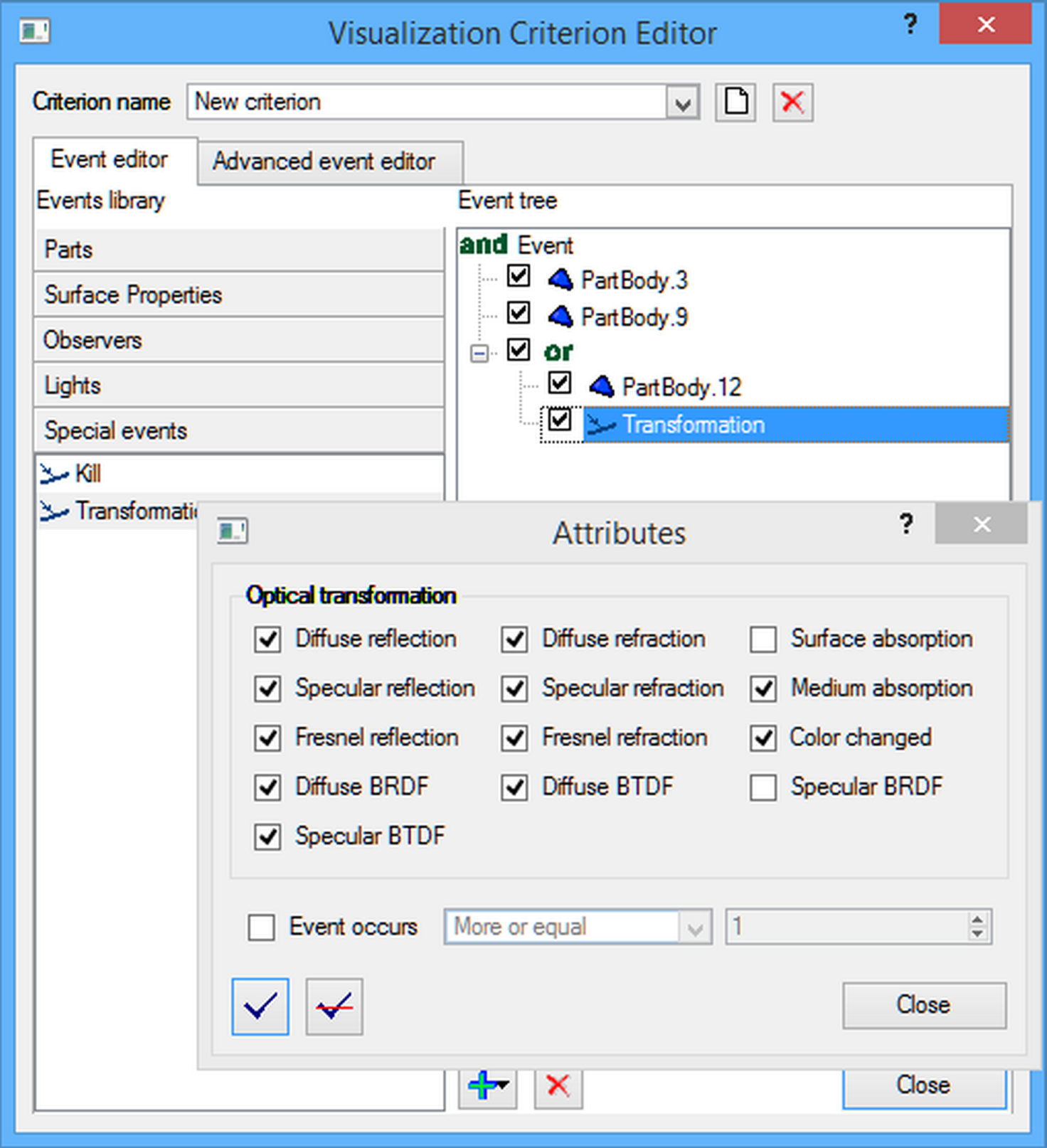
Fig. 6. User
interface of a complicated criterion for ray selection.
For this purpose, the visual analysis
module LumiVue is used, which allows you to select and edit the area on the
virtual instrument image as a rectangle or ellipse. The registration of rays on
this area can be considered as an additional criterion in the visualization of
rays. An example of such a selected area is shown in Fig. 7. Additional
possibilities of using the selected area for image analysis are given in [13].
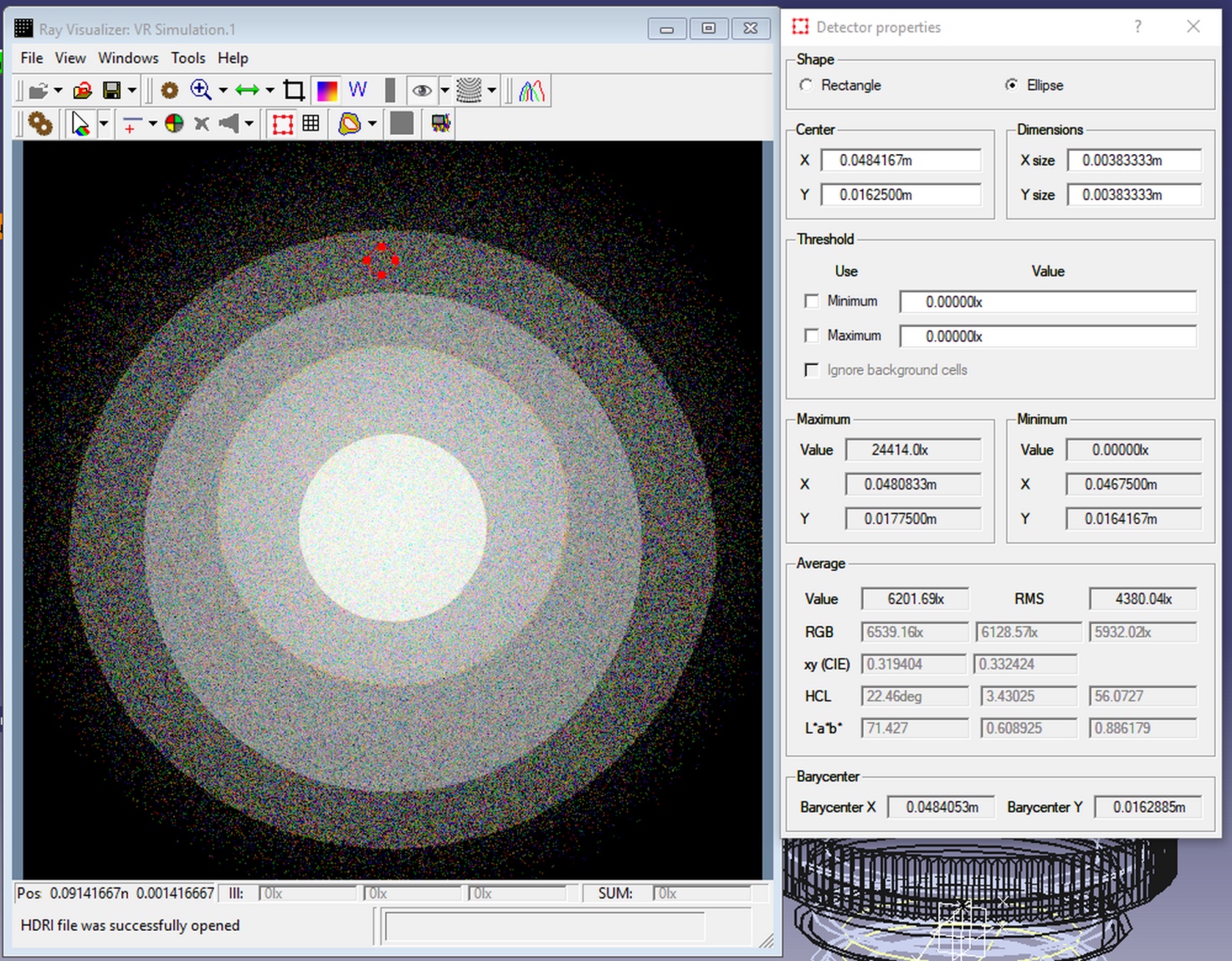
Fig. 7. Usage of selected region as a criterion
The image is loaded with the result of ray
registration on this virtual measuring device and the LumiVue window is shown
by the message LUMIVUE_LOAD, which is sent by CATIA (Fig. 3.) The path to the
image file is transmitted through the shared memory used by the processes. The
result of the simulation in the form of saved rays can use several virtual
measuring devices. One can choose any of them, or even abandon the use of
virtual measuring devices in the analysis. If the virtual device is replaced,
the LUMIVUE_LOAD message is sent again and the path to the new file with the
result of registration on the new device is sent through the shared memory. In
case of refusal to use the measuring device, CATIA sends a message LUMIVUE_HIDE
and LumiVue hides its window. To get the parameters of the selected area, CATIA
sends a LUMIVUE_DETECTOR message, and LumiVue puts all the parameters of the
selected area into shared memory. All other parameters necessary for the
construction of the criterion, and the path to the file with the rays are
already in shared memory. CATIA now sends a VR_RAY_HISTORY message. According
to this message, the I2 Server reads the file with the rays and begins to
select from them rays that satisfy the constructed criterion.
Reading a file with a three-dimensional ray
map and selecting rays from it that satisfy the constructed criterion is the
most critical procedure for the speed of visualizing light rays. It is extremely
important to provide a user-friendly response time for this procedure. It is
desirable that it does not exceed a few seconds. The algorithm for selecting
rays satisfying the constructed criterion is shown in Fig. 8.
On multi-core computers, a parallel
approach to using multiple threads is a natural approach to speeding up
processing. This approach is effectively used by us for direct Monte Carlo ray
tracing [14]. The number of threads is chosen, as a rule, equal to the number
of virtual computer cores.
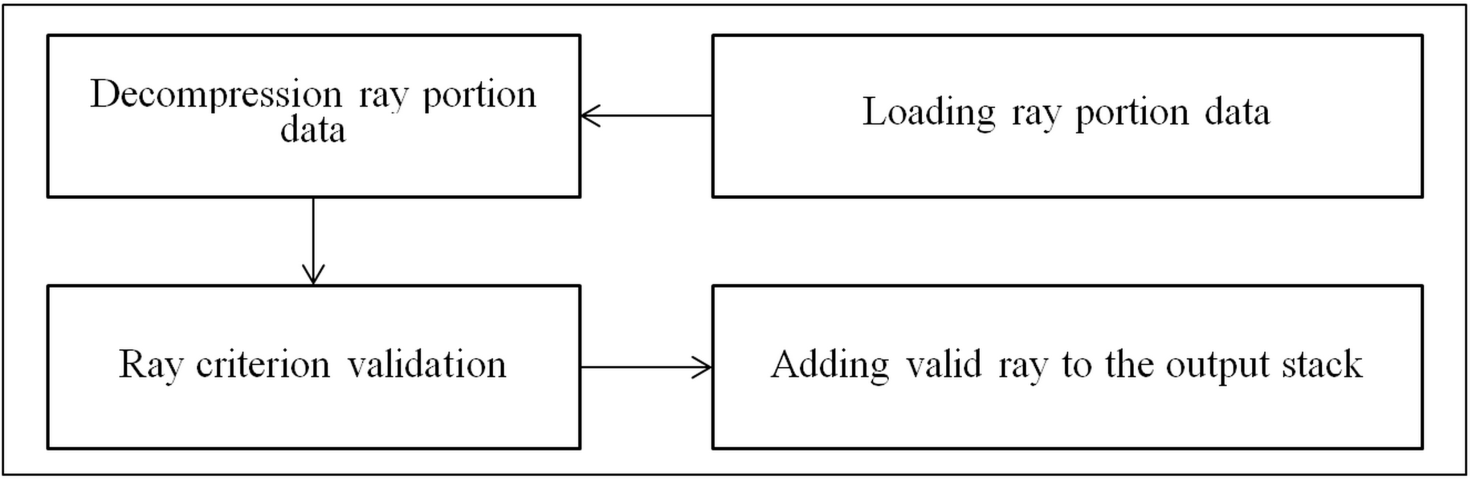
Fig. 8. General algorithm of selection of
rays satisfying some criterion.
It is clear that in the procedure shown on Fig.
8 only unpacking of a portion and checking the ray against the criterion can be
performed in parallel for different ray portions. Reading of ray portions from file
must be performed sequentially because all threads work with the same file. Adding
of a found ray that meets to the criterion to the output stack also cannot be
performed in parallel because the stack is common for all threads. So a multithreaded
scheme of selecting rays shown in Fig. 9 was elaborated.
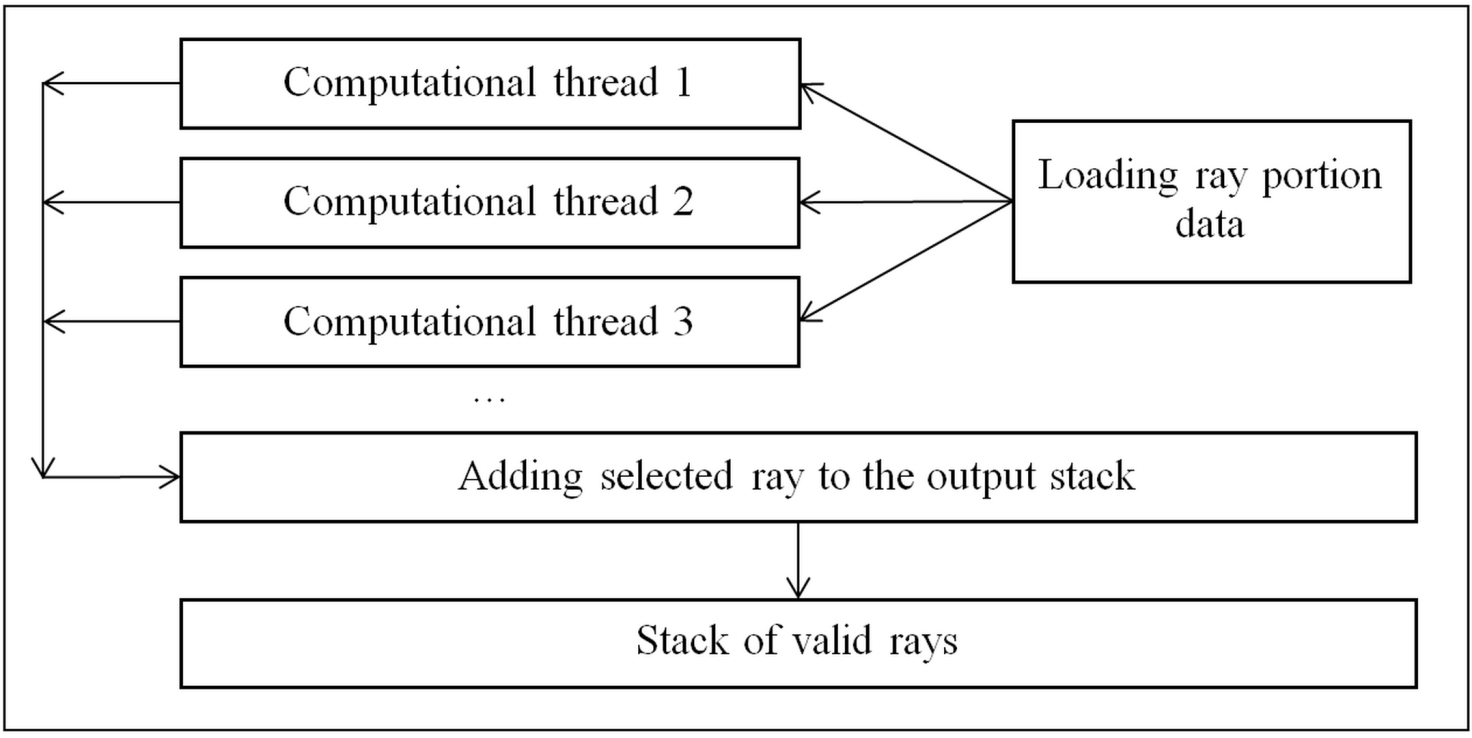
Fig. 9. Multithreaded algorithm of selection
of rays satisfying to a criterion
The analysis
procedure of the three-dimensional ray map starts after the user has specified
the necessary parameters of the ray selection criterion. All necessary objects
are created to store the results of data processing, in particular, the output
stack of rays, a file with ray map is opened. Also computational threads for
ray selection are created and started. Further, all data processing is carried
out in computational threads, while the main thread only shows the progress of
this processing, indicating the percentage of processed rays.
Rays processing
in each thread is carried out according to algorithms shown on figures 8 and 9:
1.
A ray portion is loaded from the file. As all
threads work with the same file a critical section is used for threads
synchronization. As file reading in modern computers uses the special
input/output coprocessor and a cache, this procedure almost does not restrict
the work of the threads which unpack the portions and check the criterion.
2.
Obtained rays portion is being unpacked and
searching of the rays satisfying to the specified criterion is performed.
3.
The found ray is added to the output stack in
the format suitable for immediate visualization. As the output stack is common
for all computational threads, this adding is also performed using a critical
section. Since this procedure boils down mainly to adding a pointer to an
object containing an array of segments to the stack, and quite rarely a large
number of rays are required, the execution time is quite small and does not
delay the operation of the main computational threads.
The effectiveness
of this procedure can be characterized by the following values. For a
three-dimensional ray map containing ~ 50 million rays (~ 450 million segments)
the total processing time on an Intel Core (TM) i7–4770 computer (4 cores, 8
threads) is about 40 seconds. In this case, the file was processed completely,
since the ordered number of rays that satisfy the specified criterion was not
reached. The file contained spectral data, so the file size was about 6 Gb. In
most practical cases it is sufficient to process only a few million rays. In
this case the processing and visualization of the selected rays will be carried
out in real time.
The Fig. 10 shows
the dependence of the three-dimensional ray map processing speed on the number of
used threads for the above computer. It can be seen that the proposed algorithm
scales well with an increase in the number of processors used. Even the use of
virtual processors (adding 5, 6, 7 and 8 threads) gives a noticeable increase
in processing speed.
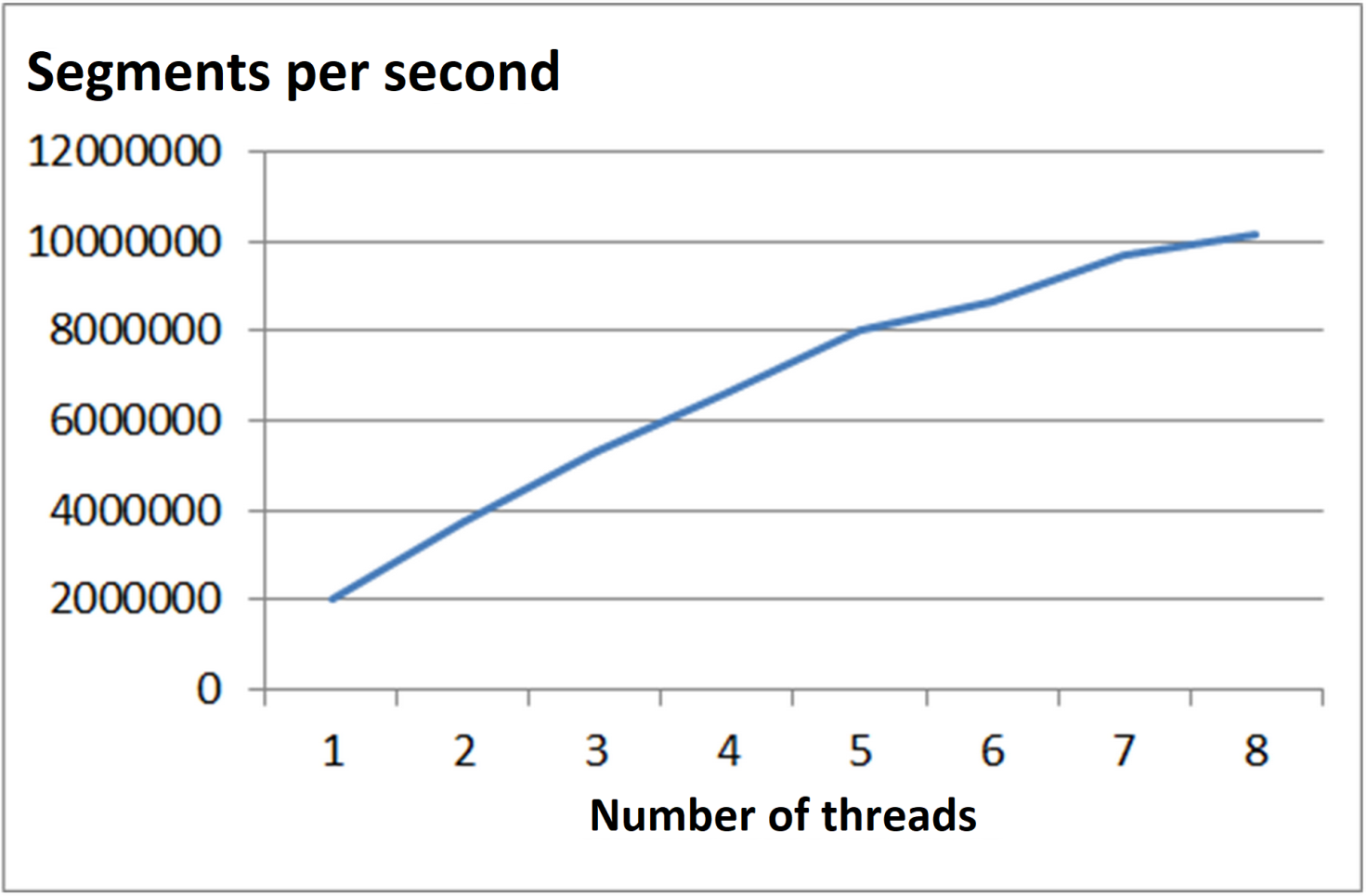
Fig. 10. Dependence of the three-dimensional ray
map processing speed on the number of used threads
Examples of ray visualization
Examples of visualization
of the ray paths in the lens system for different areas in the virtual device
image are shown in Fig. 11. A parallel beam of white light falls on the lens, in
the direction deflected from lens axis by an angle of ~ 2 degrees. The lens
material has dispersion – the value of the refraction index depends on the
wavelength of the light. Therefore after refraction of a ray at the boundary of
two media, the ray is further traced with a value of a single wavelength
selected from a set of wavelengths specified by the user. The wavelength (and
accordingly the direction of the refracted ray) is selected from a given set of
wavelengths with a probability proportional to the part of the ray energy
corresponding to the selected wavelength. For this reason, after refraction the
rays in Fig. 11 become colored if a natural color is selected for
visualization. When one clicks the Visual Ray Results Report button, the dialog
box shown in the upper right of the Fig. 11 opens, in which the user can analyze
in detail all the events which took place along the path of the ray.
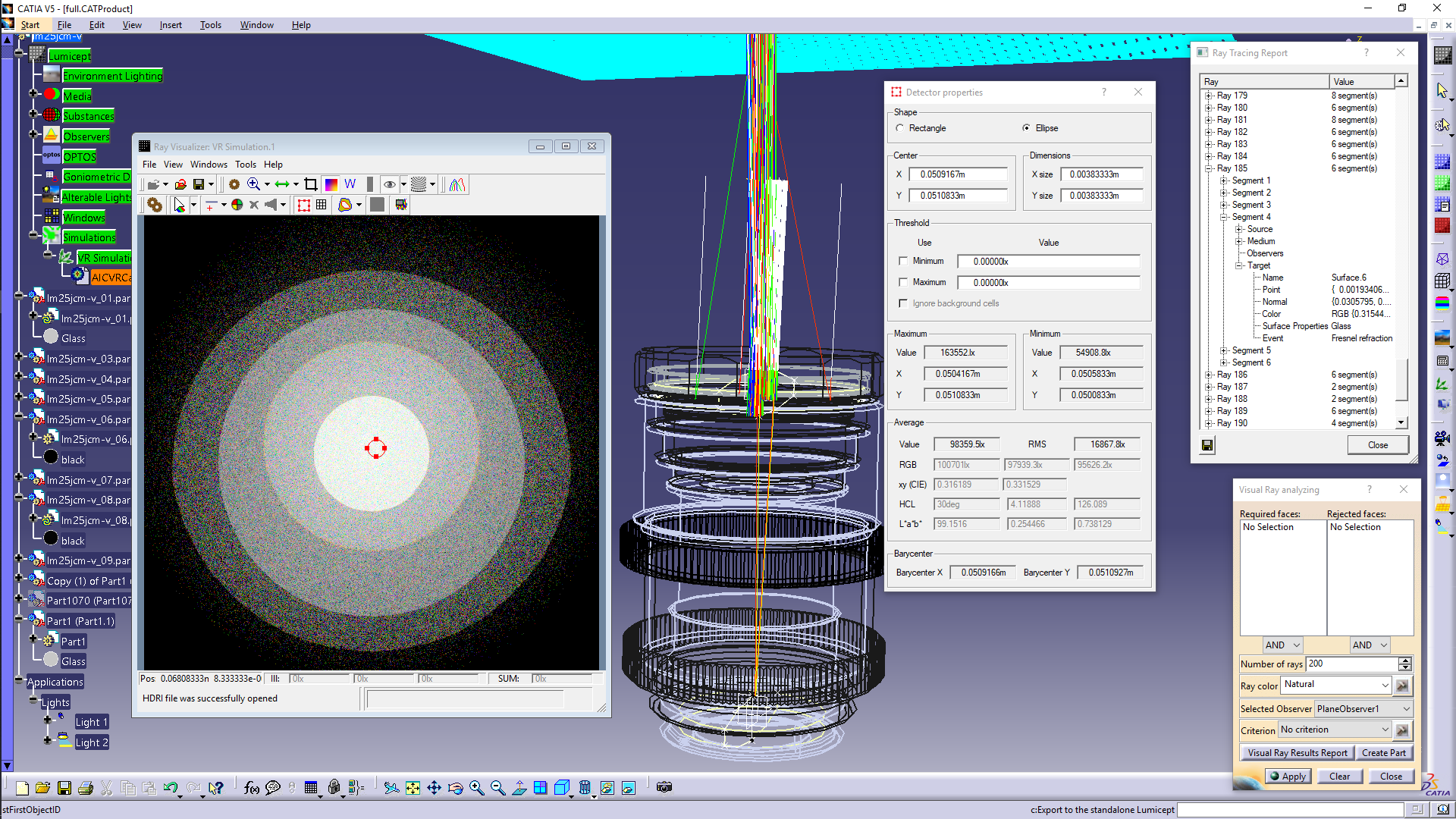
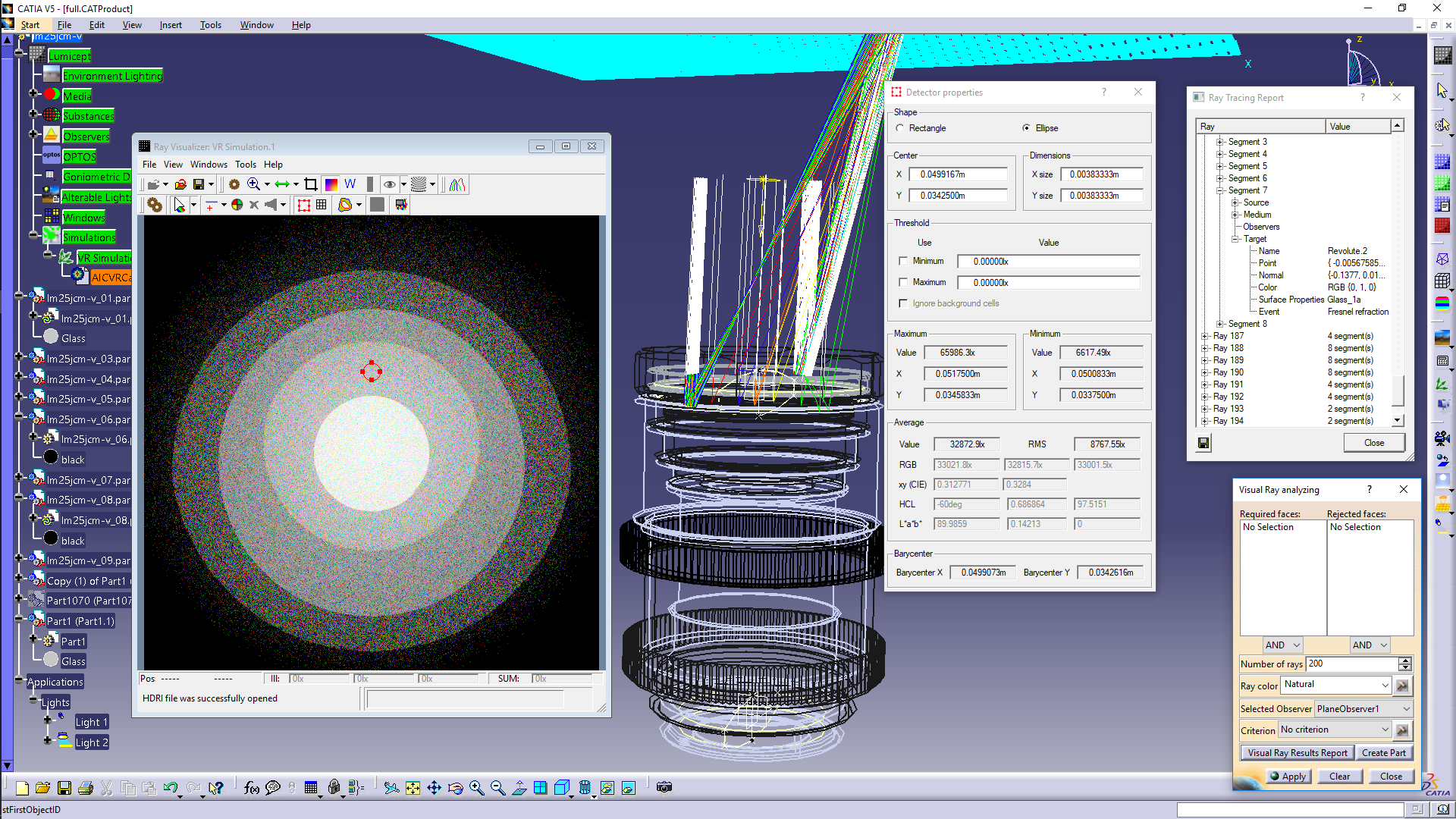
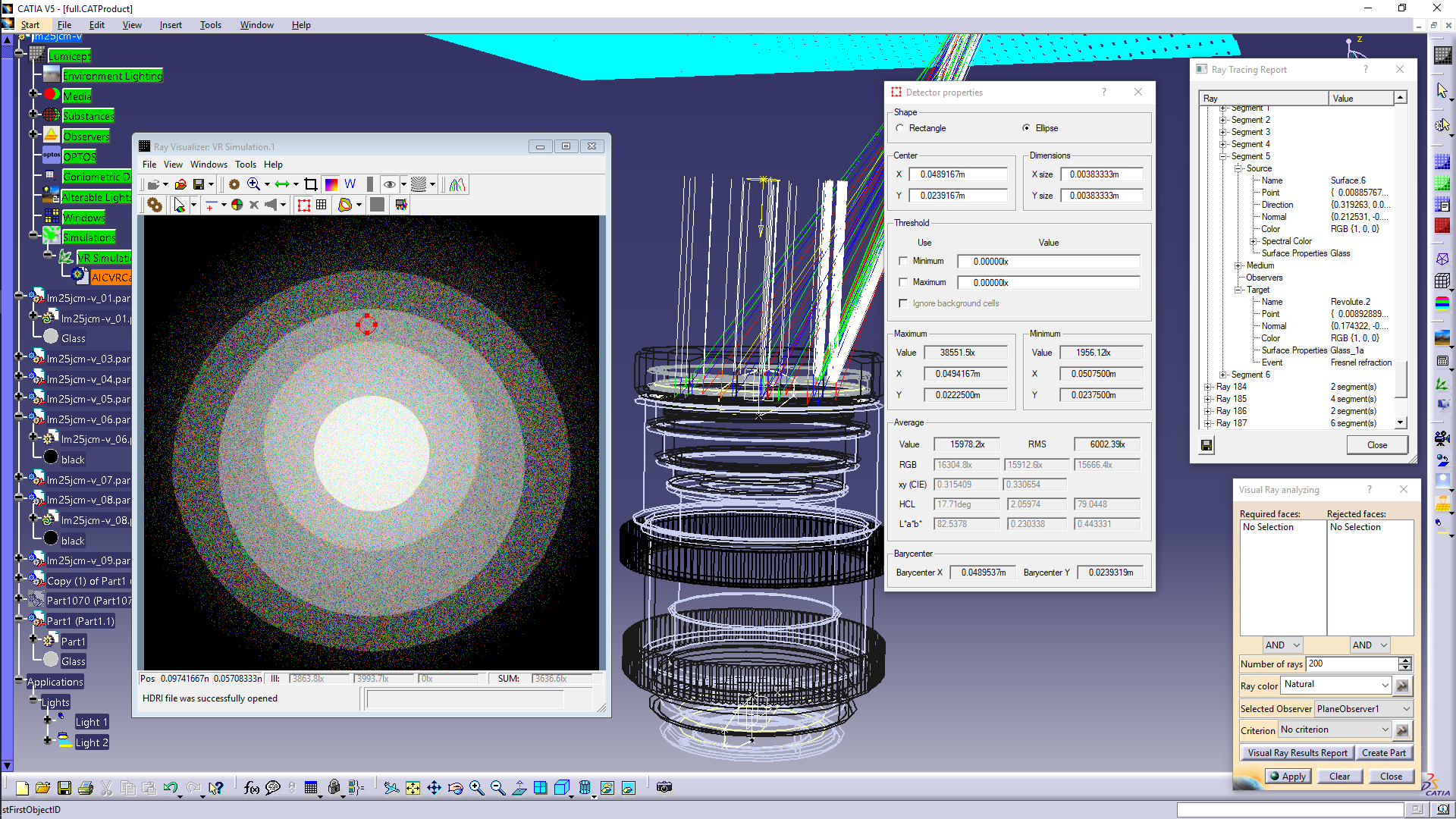
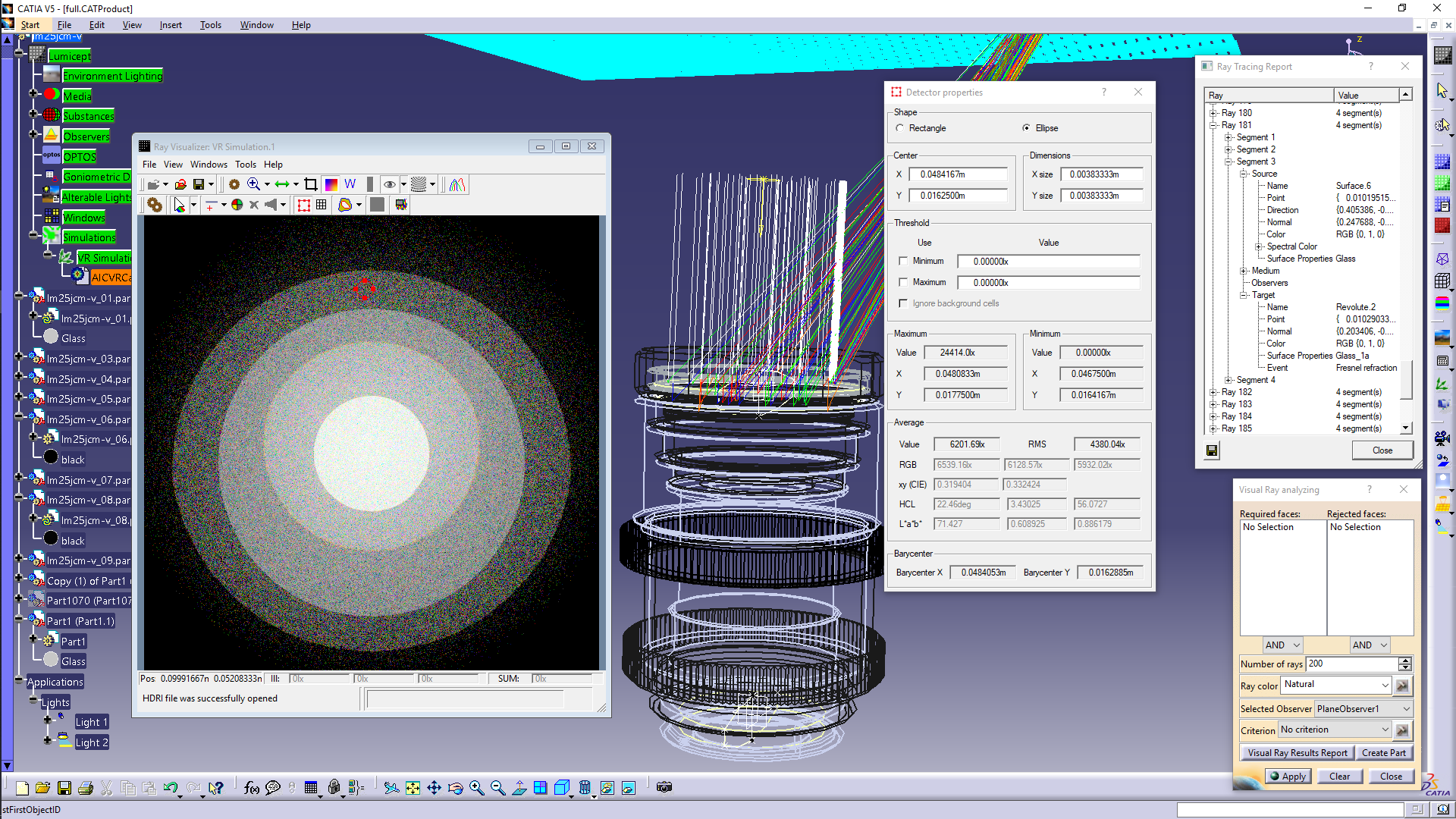
Fig. 11. Visualization of selected rays and report about the events
along the ray path.
Conclusion
The visual representation of the
trajectories of light rays has become in fact the basic functionality of modern
optical simulation systems. The developed algorithms make it possible to
efficiently use multi-core computers both for calculating the three-dimensional
map of the rays obtained by Monte Carlo ray tracing and for their visualization
using various criteria for the selection of rays. The developed algorithms are
implemented in the standalone system for the synthesis of realistic images and
optical simulation Lumicept, developed in KIAM, as well as in the corresponding
system of ray visualization integrated into CAD systems CATIA.
|
[1]
|
Pharr M.,
Humphreys G., Physically Based Rendering: From Theory to Implementation.
Second Edition. Morgan Kaufmann Publishers Inc., 2010.
|
|
[2]
|
Bogdanov
N., Zhdanov D., Potemin I., Zhdanov A. Design of Ergonomic Illumination
Systems for Cultural, Medical, Educational Facilities. The Educational
Review, USA, 1(4), 85-90. http://dx.doi.org/10.26855/er.2017.04.001.
|
|
[3]
|
Wernert E.,
A unified environment for presenting, developing and analyzing graphicsalgorithms.
Computer Graphics, т. 31, № 3, pp. 26-28, 1997.
|
|
[4]
|
Tsirikoglou
A., Kronander J., Wrenninge M., UngerJ., Procedural Modeling and Physically
Based Rendering for Synthetic Data Generation in Automotive Applications.
arxiv.org. 2017.
|
|
[5]
|
McCormac
J., Handa A., Leutenegger S., Davison A., SceneNet RGB-D: 5M Photorealistic
Images of Synthetic Indoor Trajectories with Ground Truth. The IEEE
International Conference on Computer Vision (ICCV 2017).
|
|
[6]
|
Rozantsev
A., Lepetit V., Fua P., On rendering synthetic images for training an object
detector. Comput. Vis. Image Underst. 137, C (August 2015), 24-37. DOI:
http://dx.doi.org/10.1016/j.cviu.2014.12.006.
|
|
[7]
|
Voloboj
A.G., Vishnyakov S.M., Galaktionov V.A., ZHdanov D.D., Sredstva vizualizacii
rasprostraneniya sveta v zadachah proektirovaniya i analiza opticheskih
sistem // Keldysh
Institure of Applied Mathematics of RAS Preprints, №
54, 2007, 20 p [in Russian]
|
|
[8]
|
Kopylov E.,
Dmitriev K., Light propagation visualization as a tool for 3D scene analysis in
lighting design. Computers & Graphics, т. 24, № 1, pp. 31-39, 2000.
|
|
[9]
|
Voloboj A.G., Galaktionov
V.A., ZHdanov A.D., ZHdanov D.D., Sredstva vizualizacii rasprostraneniya
svetovyh luchej v zadachah proektirovaniya opticheskih sistem.
"Informacionnye tekhnologii i vychislitel'nye sistemy", № 4, c.
28-39, 2009. [in Russian]
|
|
[10]
|
Barladyan
B., Shapiro L., Voloboy A., Ray maps technique for effective interrogation of
results of MCRT simulation // Conference proceedings of 21-th International
Conference on Computer Graphics and Vision GraphiCon-2011, Moscow State University,
September 26-30, 2011, Moscow, Russia, pp. 46-49.
|
|
[11]
|
B.H. Barladyan, E.D.
Biryukov, A.G. Voloboj, L.Z. SHapiro, «Effektivnyj algoritm vizualizacii
predvaritel'no rasschitannyh luchej» // GraphiCon-2018, Tomsk, 24–27 september 2018, p. 36-39. [in Russian]
|
|
[12]
|
"zlib"
general purpose compression library, http://zlib.net.ru/.
|
|
[13]
|
Barladian B.K., Potemin I.S., Zhdanov D.D., Voloboy
A.G., Shapiro, I.V. Valiev L.S., Birukov E.D., Visual analysis of the
computer simulation for both imaging and non-imaging optical systems // Proc.
SPIE 10021, Optical Design and Testing VII, 100210T (October 31, 2016);
doi:10.1117/12.2247751.
|
|
[14]
|
B.Kh. Barladian, L.Z. Shapiro,
E.Yu. Denisov, A.G. Voloboy. An efficient mulithreading algorithm for the simulation
of global illumination // Programming and Computer Software, 2017, Vol.
43, №. 4, pp. 217-223. DOI: 10.1134/S0361768817040028.
|
