3D models have known a significant growth in
the past years; this is due to the fact that scanning and modelling tools and
techniques become more popular and were extensively studied, in addition to the
fact that many fields now make use of such models (medicine, biology,
mechanical engineering, augmented reality). The availability of such models
over the World Wide Web and the ease to create them made indexing such data for
retrieving or comparing be a complicated task, requiring considerable amounts
of algorithms and tools to extract a good shape similarity/dissimilarity
measure that represents or describe the 3D model in a compact way.
A retrieval system can be defined as a system
that given a query model can return the most similar models to the query based
on a signature or a descriptor that represent the 3D object. The final goal
would be to provide results that match as much as possible the humane
perception. Many methods and techniques have been proposed during the past
years to solve this problem; the majority of these approaches propose to
extract some local or global geometric or topologic information directly from
the 3D object or from its 2D representation (binary images, projection, depth
images). Once these features are extracted, they are then used as a descriptor
to be compared with the descriptor of other 3D objects and return the models
with the biggest similarity. We encourage readers to refer to the works of Lara
López et al. [1], Yang et al. [2] and Tangelder et al. [3] were the authors provide an extensive state of
the art of existing method and a comparison of performance between them.
Recently researchers oriented their effort to the use of machine learning
techniques in this field; the majority of these methods uses features extracted
from 3D projections and use them for the training step. We can mention, for
example, the work of [4], [5] who uses a convolutional neural network (CNN)
trained over many 2D projections for the same 3D object, the objective of the
training is to make the CNN able to classify the 3D object into the correct
class. Finally, once the CNN is well trained the authors extract a signature
form the CNN corresponding to each 3D model. This kind of approach is very
powerful and provides excellent results since generally machine learning
methods can resolve classification problem with outstanding accuracy, but the
problem with such approach is that they need lots of data to use in training
step which imply the need of powerful machine and lots of time to do this task.
In this paper, we present a new retrieval
method that uses an artificial neural network (ANN), which will be trained to
classify 3D objects, and then extract a descriptor from the trained ANN,
representing each 3D object. The main contribution of the proposed approach is
during the training step, we extract features directly from the 3D object
without using 2D projection. The extracted features will be transformed to
histograms then used to feed our ANN. The use of histogram directly extracted
from the 3D object helps our ANN to train fast with useful data (since
histograms have been used in many previous works as descriptors and they
succeed to provide satisfactory results). Finally, the proposed approach does
not need to be executed in powerful machine, since the size of the used data is
relatively small.
The present paper is organized as follows: In
section 2, we review a brief state-of-the-art of the existing descriptors in
the literature. In section 3, we describe our proposed approach. The
experimental results are discussed in section 4. Finally, in the last section,
we present a conclusion and some perspectives.
Due to the importance of the Content-based 3D
model retrieval field, many methods and approaches have been proposed in the
last decades trying to provide results that match as much as possible the human
perception. Since textual descriptions are not a good solution because of the
huge time and the resources needed to achieve this task, and even the results
are not quite good (many facts can impact the results), the best solution is to
extract a signature or a descriptor that compactly represent the 3D model. Many
descriptors have been proposed in the literature; generally, we can classify
them into two broad categories: 3D shape descriptors and view-based descriptors.
This category gathers all methods that use any
3D representation (polygon, point cloud, voxel) as it is, to extract any
geometric or topological properties (distances, angles, curvatures). Many
methods have been proposed with this logic, we can mention the work of Osada et
al. [6] who proposed five shape distribution based on
global characteristics of the 3D object which are (Fig.1) angle, Euclidian
distance, area and volume computed on randomly selected points on the surface
of the 3D mesh. These distributions are quite fast and easy to compute, but
they still cannot give a good representation of the 3D object.
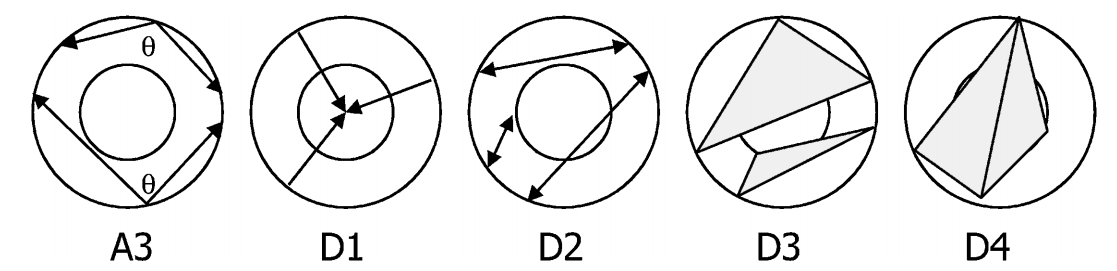
Fig. 1. The five distibution proposed by Osada et al.[6] based on angles (A3), distance (D1 and D2),
areas (D3), and volumes (D4)
Zaharia et al. [7] proposed a descriptor called Shape Spectrum
Descriptor (SSD) which computes a histogram of shape index over the whole 3D
mesh. This method provides satisfactory results but its main inconvenient is
that it needs a pretreatment step for meshes that are not topologically correct
or not orientable, and also the shape index is not defined for flat faces. Funkhouser
et al. [8] proposed an approach based on spherical harmonics,
which helps to transform any descriptor to rotation independent ones. This is
done by decomposing the function into spherical harmonics then summing the
harmonics with the same frequency finally computing the L2-norm for each
frequency component. Recently we proposed a new retrieval approach [9] the main idea behind this new approach is to
propose a way to combine any features extracted from the 3D object to extract a
final hybrid descriptor that regroup all the inputs features. To achieve this
task we choose to use Data envelopment analysis (DEA) [10] which can extract a final score or descriptor
(based on the inputs features), to test this approach we use DEA to combine the
dihedral angle, shape index, and the shape diameter function (SDF), the
obtained results were very satisfactory.
This kind of descriptors assumes that two 3D
models are similar if these models look the same from all viewing angles. These
descriptors use any 2D projection (binary images, 2D projection or depth
images) to represent the 3D model and extract a 2D descriptor based on the
projections. The main inconvenient of this kind of approaches is the choice of
the number and the representative views, which can heavily affect the results.
Papadakis et al. [11] proposed a new shape descriptor based on
panoramic views, these views are extracted by projecting the 3D object to the
lateral surface of a cylinder parallel to one of its three principal axes, for
each projection the authors propose to compute its corresponding 2D Discrete
Fourier Transform as well as 2D Discrete Wavelet Transform. Chen et al. [12] introduced a LightField descriptor, which is
based on extracting silhouette images from ten viewing angles distributed on a
regular dodecahedron. Each silhouette image is encoded by a combination of 35
coefficients for the Zernike moments descriptor, and 10 coefficients for the
Fourier descriptor. Finally, the authors define the dissimilarity as the
minimum dissimilarity between each LightField descriptor and other LightField descriptors.
Atmosukarto et al. [13] presented a descriptor based on learning
shape characteristics to extract salient 2D views, finally to compute the
similarity between extracted views of two 3D object the authors use measure
developed by Chen et al. [12]. Su et al. [5] proposed a novel Multiview method for
retrieving and classifying 3D objects. This method is based on Convolutional
neural network, which learns to combine many 2D views to extract a final
descriptor. The authors tested two setups the first one using 12 representative
views and the second one using 80.
The proposed approach aims to combine any sets
of features without any imposed order, using an artificial neural network, and
finally extract a signature or a descriptor to represent the 3D model
effectively, in a reasonable time and without the need of a powerful machine to
run it. The proposed method can be summed in the following steps.
To train our neural network we need to feed it
with input data, almost all previous works using neural network in the 3D
field, are view based [4], [5], that’s mean they extract features from many
2D projections of the 3D object. The main inconvenient of such methods is that
it takes lots of time to extract, choose and stock good and relevant 2D
projections which imply the need for a very powerful machine to train the
neural network. In the proposed approach, we decide to extract vectors of
feature directly from the 3D object and use the histogram extracted from these
feature vector as input for our neural network. Using this technique our neural
network uses less memory and perform the training in a small amount of time. For
our experiment, we choose to use three features extracted from the 3D object,
which are:
Shape index: proposed by Koenderink et al. [14] in 1992 the shape index is a value between 0
and 1, this value represents the curvature or the topology of the local surface
based on the principal curvatures ( and
and  ). The index is widely used in the 3D field. The shape index is
formulated as follow:
). The index is widely used in the 3D field. The shape index is
formulated as follow:
(1)
where and are the principal curvatures with  ≥ .
≥ .
It is noteworthy that we didn't take into
consideration the case where = which imply a plan surface since the shape index isn't defined in this
case and the number of perfectly plan faces are very small, so the final
generated descriptor won't be affected
Dihedral angle: this one of the most feature
used in many 3D fields (segmentation, indexation, classification), this
measures the angle between two adjacent faces. Mathematically the dihedral
angle between two adjacent faces  and
and  is defined as follow:
is defined as follow:
(2)
where  and
and  are respectively the normal vector of the face and .
are respectively the normal vector of the face and .  is the norm of the vector .
is the norm of the vector .
Shape Diameter Function (SDF) [15] : proposed by Shapira et al. it’s a scalar
value that represent the thickness on each face on the 3D object. The SDF is
computing by a cone centered on each face and sampling rays within the cone,
finally we take the average of the lengths of all the rays.
The choice of these features is made because
they are easy to compute, they can give a satisfactory representation of the 3D
model (all these measures have been previously used as a descriptor), they are
pose-invariant, and finally to make it easy to compare the results with our
previous work.
As mentioned before we use the three features
of each 3D object as the input of our artificial neural network, to generate a
descriptor for each 3D model. The choice of using an ANN was made because of
their parallel structure and their ability to solve complex classification
problems. To use the ANN classifier, we have to specify some parameters, which
can heavily affect the final results, such as the network architecture, network
type, and the training algorithm.
For the network type, we choose to use the
feedforward network, which is one of the most used ones, and also known for its
excellent results, and does not need a big amount of training data to provide
satisfactory results. The backpropagation algorithm is used to improve the
accuracy of the predictions of our ANN, by finding the best weight of each
connection in the neural network.
Since there is no general rule on how to set
and choose the architecture, we tried many of them, and the one that seems to
provide the best result is the following: we choose to use four-layer neural
network, an input and output layer and two hidden layers. The number of neurons
in the input layer is the same as the input data (three features each one is
represented with a histogram of 64 elements), the output layer is composed of
19 neurons each neuron correspond to a class of the 3D objects. Finally, and
after several tests, the number of hidden neurons on the hidden layer was
chosen empirically to maximize the effectiveness of the proposed approach.
Figure 2 summarizes the entire process of the proposed method.
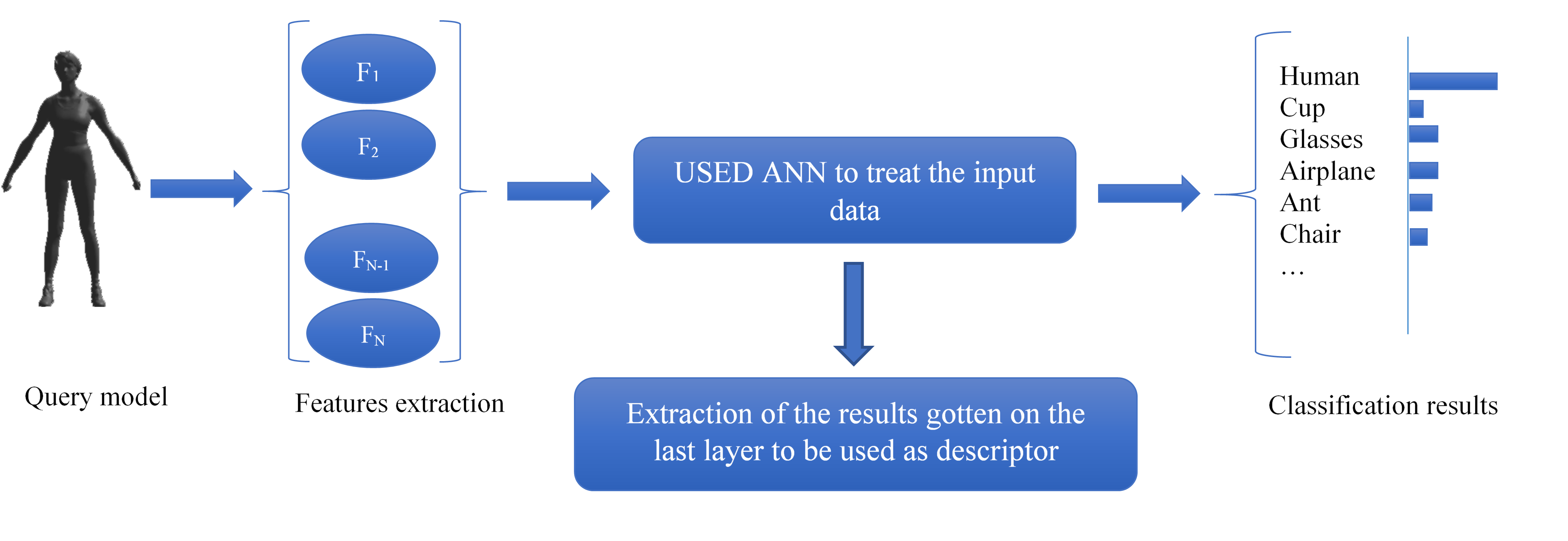
Fig. 2. Illustration that summarizes the whole process
of the proposed approach
The fourth section of this paper is dedicated
to the experimental studies, through several tests we will validate the
proposed method and show its discriminative power compared to other well-known
methods founded in the literature.
Before starting our test, we need to choose a
database, which will be used during our tests. Many databases can be considered.
We can mention Princeton shape benchmark (PSB) [16], Shape Recognition Contest (SHREC), National
Taiwan University database (NTU) [12], Konstanze 3D Model Benchmark (CCCC) [17], or NIST Generic Shape Benchmark (NSB) [18]. For our experiments, we choose to use
Princeton's segmentation benchmark database [19], which is a modified version of the
Watertight Track of the 2007 SHREC Shape-based Retrieval Contest [20] and expand it with some models taken from the
Princeton shape benchmark and the National Taiwan University database. Our
choice went to these databases for many facts, the first one was the diversity
of this database, it contains over 570 3D models divided into 19 classes
(Human, Cup, Glasses, Airplane, Ant, Chair, Octopus, Table, Teddy, Hand, Plier,
Fish, Bird, Armadillo, Bust, Mech, Bearing, Vase, and Fourleg). The second
reason is that many models from different classes share the same geometric
aspect even if they are not semantically similar, for example, birds and
airplanes, tables and chairs, which will be a challenging task to detect in the
retrieval process.
From the used database we choose N meshes
randomly from each category to be used to train the ANN, the rest of the meshes
are used for the tests. In our experiments, we chose to set N=10 and N=15 and
call the resulting database respectively DB10 and DB15.
The first test is a classic one in the
information retrieval field, which is the precision and recall diagram. The
recall measures the relevant results retrieved over the total relevant in the
database, and the precision measures the relevant results among the retrieved
instances.

(3)

(4)
Figures 3 and 4 represent the precision-recall
curves obtained using the proposed approach along with PANORAMA [11], LightField [12] , Harmonics [8], and multicriteria with DEA [9]. The obtained results show that our method
provides very satisfactory results, it did almost as good as the PANORAMA
method for the DB10, and it outperforms LightField, Harmonics, and even DEA
even if it combines the same features. In the other hand for DB15, the proposed
method outperformed all four methods. These results are excellent considering
the small number of models used in the training step respectively 10 and 15
models per class.
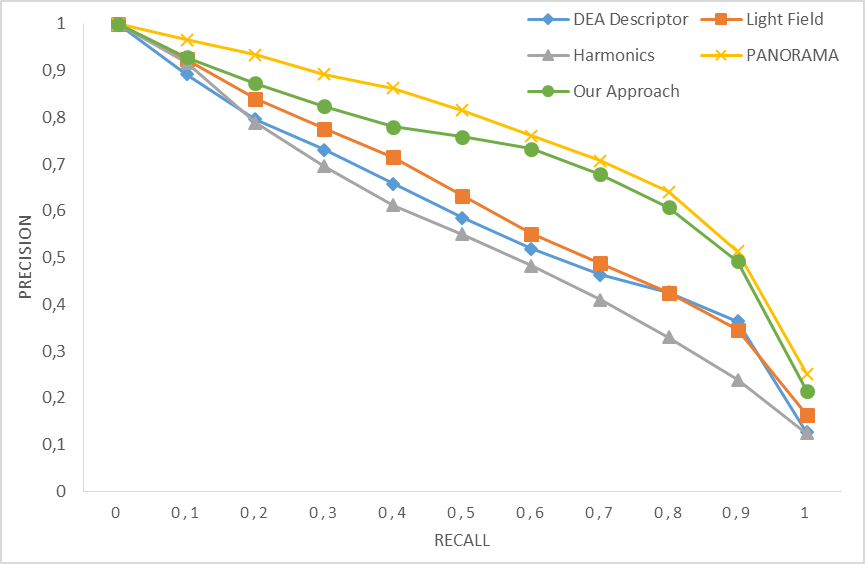
Fig. 3. Precision-Recall graph using four different
descriptors along with the proposed one on the database DB10
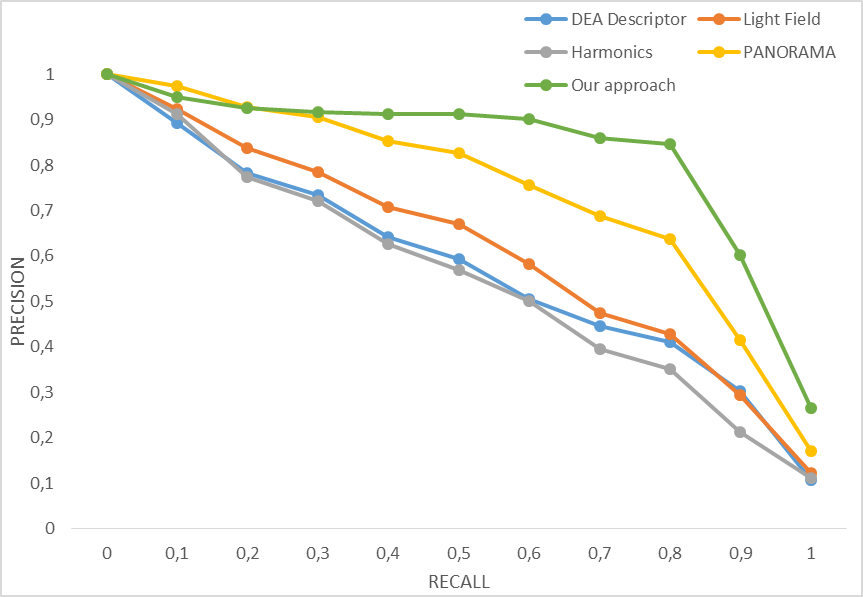
Fig. 4. Precision-Recall graph using four different
descriptors along with the proposed one on the database DB15
The second test will quantify the performance
of our proposed method by computing some evaluation metrics, which are:
·
Nearest Neighbor (NN): represent the percentage
of the top K-relevant items belonging to the retrieval results where K=1.
·
First Tier (FT) and Second Tier (ST): computes
the recall for the top C−1 and 2*(C−1) correctly retrieved objects
in the result list, where C represents the number of item in each class.
·
Discounted Cumulative Gain (DCG): a scalar that
focuses on the items that are correctly retrieved and are in the front of the
results list, since generally, a low ranking position has a low probability to
be discovered by the user.
·
F-Measure: The F-Measure simply generate a
measure that combines the recall and precision values to express the overall
performance of the retrieval system. It is computed as follow:

(5)
Table 1 represents the obtained results along
with those of the following methods PANORAMA, LightField, Harmonics and
multicriteria with DEA. The obtained results are the same deduced from the
precision-recall curves, for the DB10 the panoramic provides the best results
for all metrics, our approach followed behind closely, LightField and DEA come
after, finally Harmonics with the less relevant results from all the tested
methods. For DB15 our method performed very well and outperformed all the
tested approach since it got the best scores for almost all the metrics.
Table 1: Performance comparison on DB10 and DB1 using the
proposed approach, PANORAMA, LightField , multicriteria with DEA and Harmonics
|
|
Descriptors / Scalar Metrics
|
NN
|
NN+1
|
FT
|
ST
|
DCG
|
F-Measure
|
|
DB10
|
DEA
|
0.80
|
0.69
|
0.55
|
0.35
|
0.81
|
0.48
|
|
LightField
|
0.84
|
0.77
|
0.58
|
0.36
|
0.83
|
0.52
|
|
Harmonics
|
0.85
|
0.67
|
0.51
|
0.33
|
0.80
|
0.48
|
|
PANORAMA
|
0.92
|
0.89
|
0.74
|
0.43
|
0.90
|
0.62
|
|
Proposed approach
|
0.89
|
0.87
|
0.71
|
0.41
|
0.88
|
0.59
|
|
DB15
|
DEA
|
0.80
|
0.71
|
0.55
|
0.35
|
0.82
|
0.40
|
|
LightField
|
0.88
|
0.82
|
0.57
|
0.36
|
0.85
|
0.43
|
|
Harmonics
|
0.85
|
0.74
|
0.51
|
0.33
|
0.81
|
0.40
|
|
PANORAMA
|
0.94
|
0.93
|
0.72
|
0.42
|
0.91
|
0.50
|
|
Proposed approach
|
0.93
|
0.93
|
0.84
|
0.45
|
0.93
|
0.51
|
The third test is done to show a global
overview of the results obtained for all models in the test set. To do so we
compute the dissimilarity matrix which consists in computing the dissimilarity
between all pairs of 3D objects in the test database (DB15) using our approach,
PANORAMA, LightField, multicriteria with DEA and Harmonics; the resulting
matrix can be divided into 19×19 blocks (for the 19 classes), also it
should be symmetric and square. A robust retrieval method should have a smaller
dissimilarity score in the diagonal’s blocks, which imply a higher similarity
between objects in the same class and higher dissimilarity between objects in
different classes. As can be observed from the figure 5, our proposed method
provides excellent results since the dissimilarity results in the diagonal
blocks range from 0 to 0.35 and it is higher in other parts of the matrix. We
can also observe a small dissimilarity (0.25 to 0.4) between some objects in
different classes for example airplane and bird, ant and octopus this is due to
a big similarity from a geometric point of view between these categories.
PANORAMA did also well with a small dissimilarity score in the diagonal
(between 0.3 to 0.5) and higher scores elsewhere. For the LightField, Harmonics
and DEA they got a good dissimilarity scores for same classes, but they did
detect a false similarity between some classes for example cup and armadillo or
hand and plier which is not correct neither from a geometric nor from a
semantic point of view.
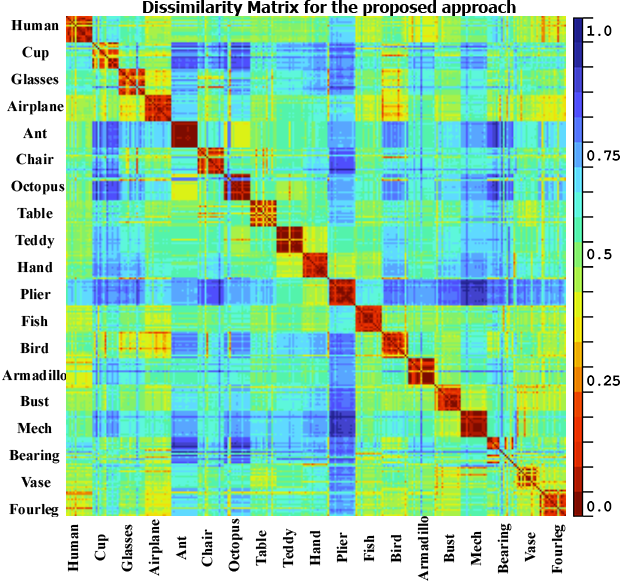
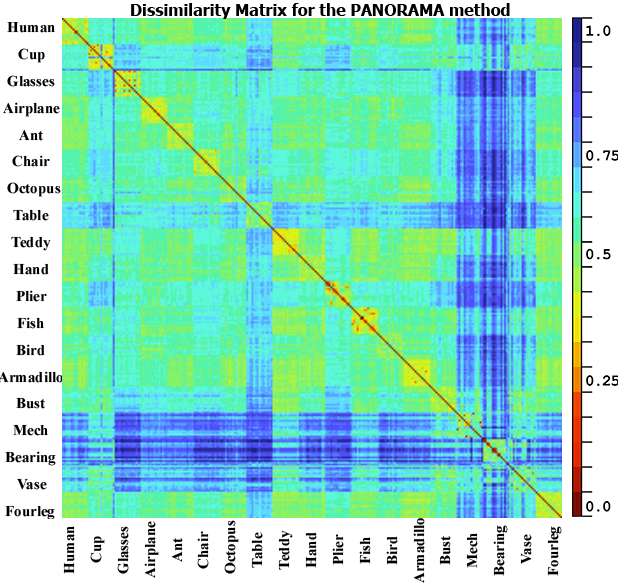
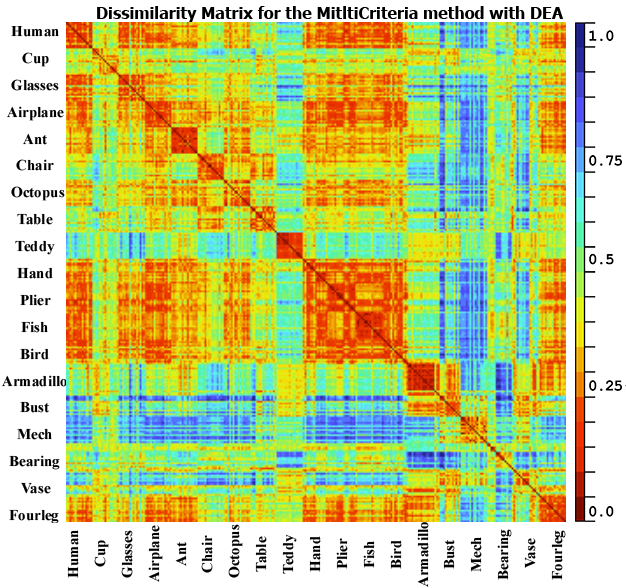
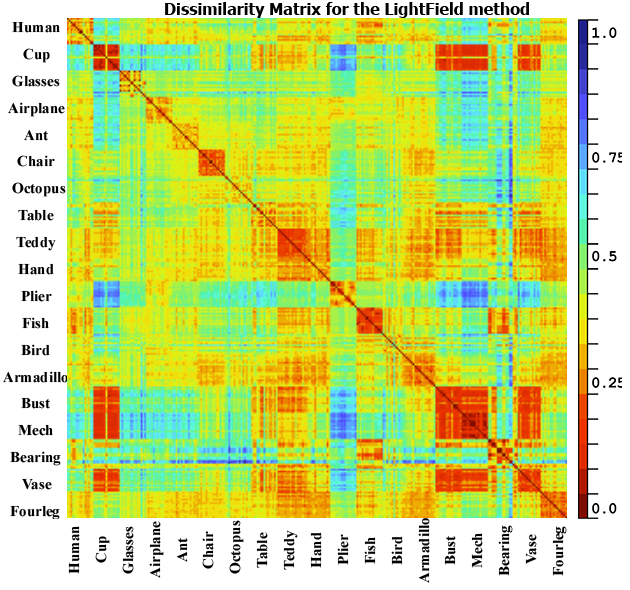
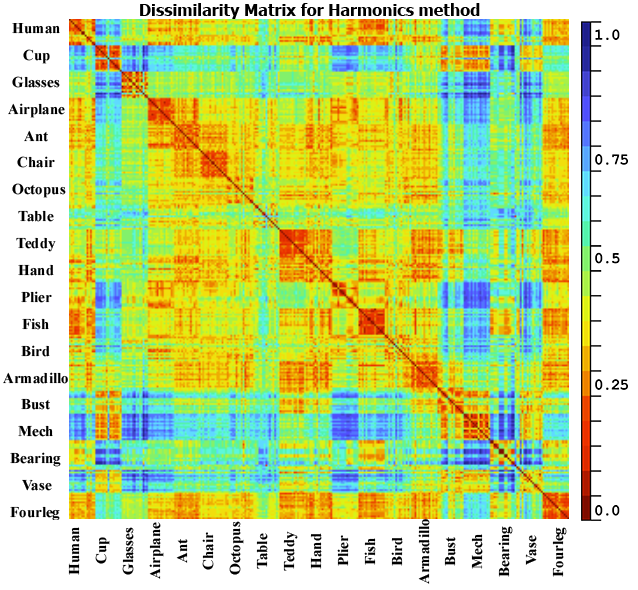
Fig. 5. Dissimilarity matrix for the database DB15 using
the proposed approach, PANORAMA, LightField and multicriteria with DEA
Finally, the last test will present the top
six nearest neighbor for eight query (one per class) selected randomly. Our
approach will be compared again with the same four methods as before. The
obtained results in Fig. 6 show that our method succeeds to give very good
results for the entire tested queries followed once again by PANORAMA which also provides very good results except for
a query representing a table it gives a score of four out of six correctly
retrieved models. Followed with DEA, LightField and Harmonics with almost the
same performance they both got a full score for the following queries: chair,
teddy, armadillo and fish for the other classes they obtain a score that ranges
from 0% to 66% of correct similar objects.
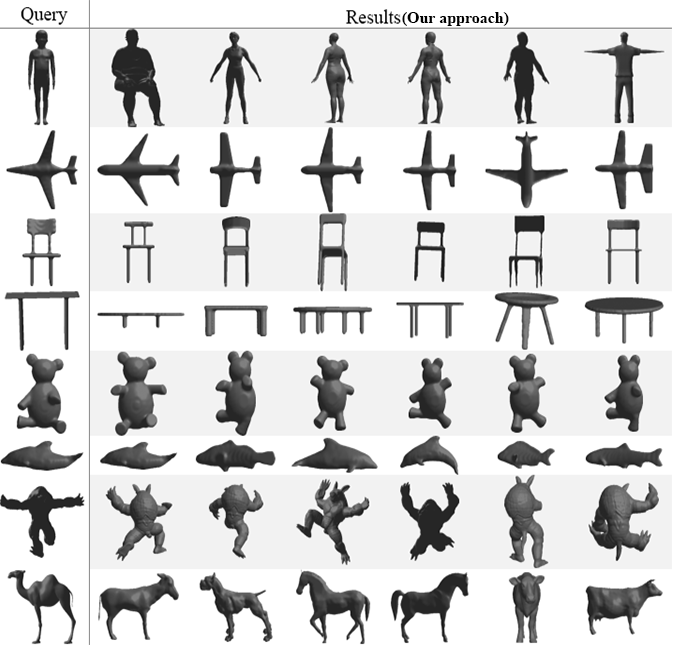
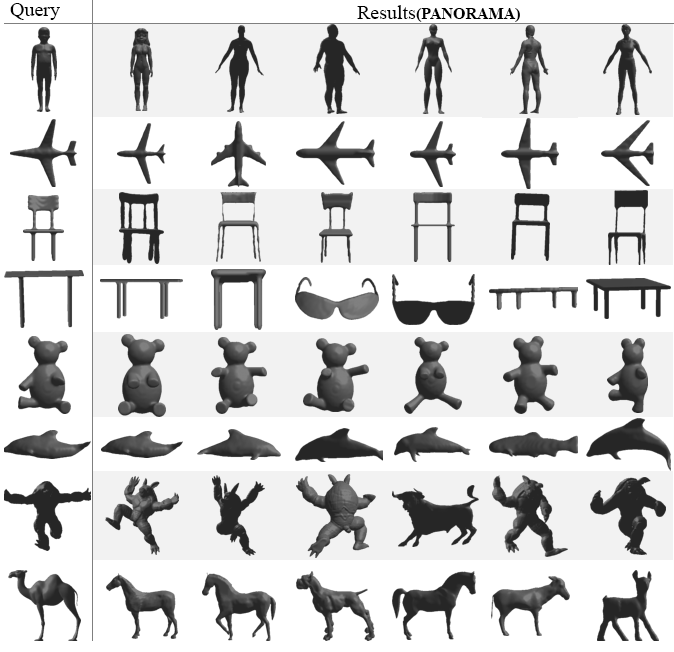
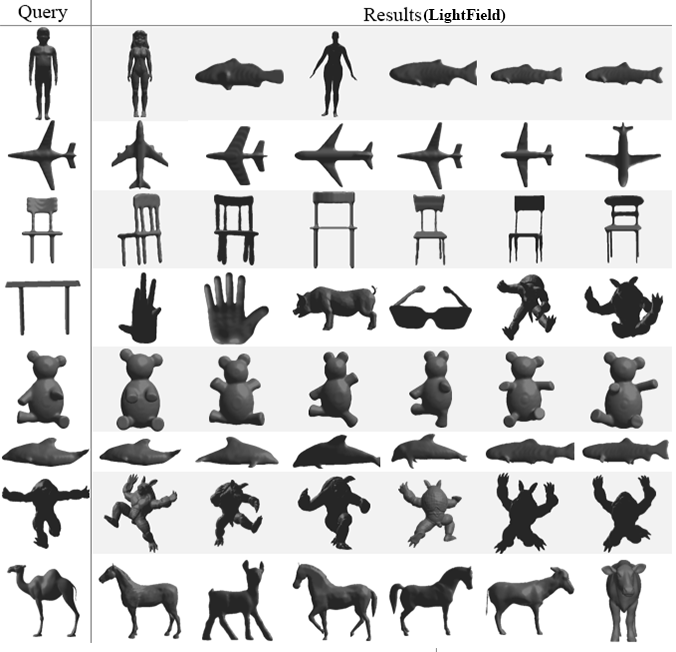
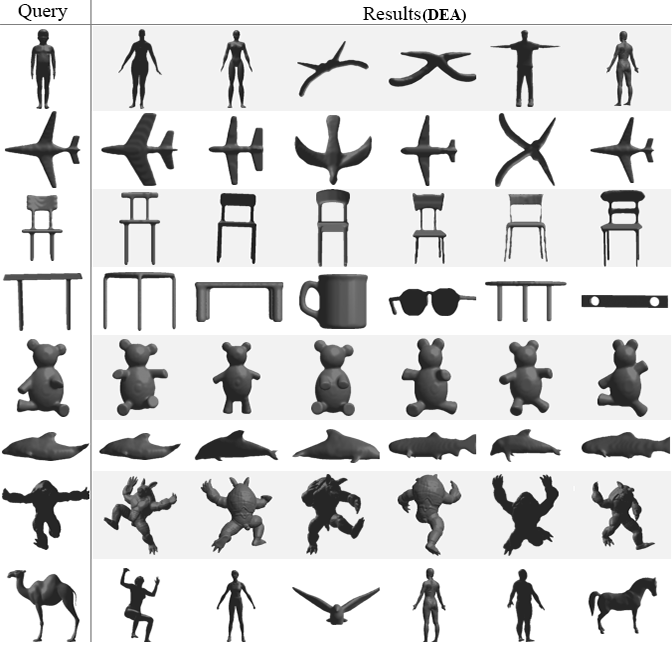
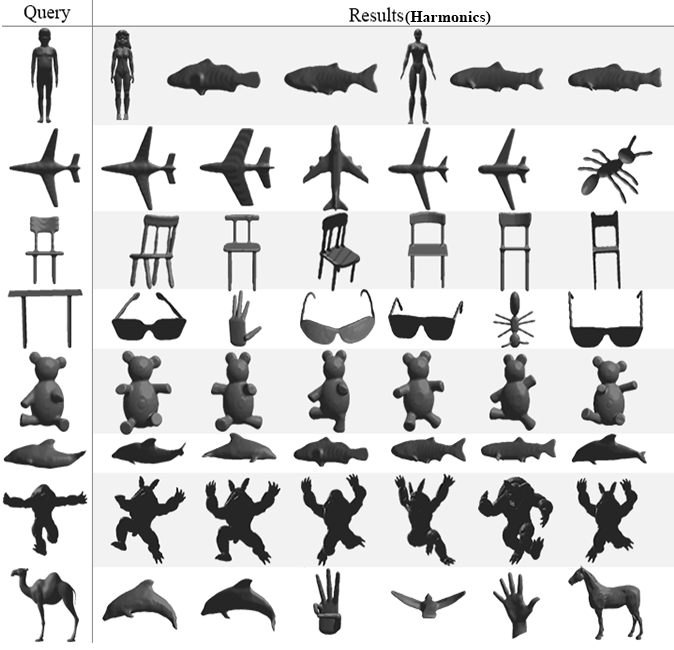
Fig. 6. Top 6 retrieved 3D models using the proposed
approach and four other methods
From all the previous tests, we demonstrate
the excellent performance and the efficiency of the proposed method, which
consist in training a simple artificial neural network with a histogram of
features, extracted directly from the 3D object, without going through 2D
projections representing the 3D model. This approach is less time and memory
consuming, since the whole process of training take between 15 to 25 minutes,
and can run on low to medium specification, the tests in this paper were run on
two computers with following specification:
·
Intel Core I5 (second generation) 2.50 GHz and
4Gb of Ram;
·
Intel Core 2 Duo 3.00 GHz, with 3Gb of Ram.
In the present paper, we propose a new
retrieval method, based on an artificial neural network. We propose to train
the ANN with a histogram of features extracted directly from the 3D object.
Using this method, we can train our ANN fast and with consistent data without
going through any 2D views. Once our ANN trained, we can use the resulted
knowledge to extract a signature that can be used to compare between models.
The experimental results show an excellent result obtained by the proposed
approach compared with other well-known methods. For future works, we plan to
investigate other features to be combined using the same approach and compare
the performance.
The authors would like to thank Michael
Kazhdan, Papadakis Panagiotis, and Chen Ding-Yun for making available the
executable code for their methods respectively the Spherical Harmonics,
PANORAMA, and LightField. We would also like to thank George Ioannakis et al. [21] for their online platform (http://retrieval.ceti.gr/) which made it
easy for us to evaluate our method.
[1] G. Lara López, A.
Peña Pérez Negrón, A. De Antonio Jiménez, J.
Ramírez Rodríguez, and R. Imbert Paredes, “Comparative analysis
of shape descriptors for 3D objects,” Multimedia Tools and Applications, vol.
76, no. 5, pp. 6993–7040, Mar. 2017.
[2] Y. Yang, H. Lin, and Y. Zhang,
“Content-Based 3-D Model Retrieval: A Survey,” IEEE Transactions on Systems,
Man and Cybernetics, Part C (Applications and Reviews), vol. 37, no. 6, pp.
1081–1098, Nov. 2007.
[3] J. W. H. Tangelder and R. C.
Veltkamp, “A survey of content based 3D shape retrieval methods,” Multimedia
Tools and Applications, vol. 39, no. 3, pp. 441–471, Sep. 2008.
[4] Fang Wang, Le Kang, and Yi Li,
“Sketch-based 3D shape retrieval using Convolutional Neural Networks,” in 2015
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2015, pp.
1875–1883.
[5] H. Su, S. Maji, E. Kalogerakis,
and E. Learned-Miller, “Multi-view Convolutional Neural Networks for 3D Shape
Recognition,” in 2015 IEEE International Conference on Computer Vision (ICCV),
2015, pp. 945–953.
[6] R. Osada, T. Funkhouser, B.
Chazelle, and D. Dobkin, “Shape distributions,” ACM Transactions on Graphics,
vol. 21, no. 4, pp. 807–832, Oct. 2002.
[7] T. Zaharia and F. J. Preteux,
“3D-shape-based retrieval within the MPEG-7 framework,” in Nonlinear Image
Processing and Pattern Analysis, 2001.
[8] T. Funkhouser et al., “A search
engine for 3D models,” ACM Trans. Graph., 2003.
[9] M. Bouksim, F. R. Zakani, K.
Arhid, M. Aboulfatah, and T. Gadi, “New Approach for 3D Mesh Retrieval Using
Data Envelopment Analysis,” International Journal of Intelligent Engineering
and Systems, vol. 11, no. 1, pp. 1–10, 2018.
[10] A. Charnes et al., “Measuring the
efficiency of decision making units,” European Journal of Operational Research,
vol. 2, no. 6, pp. 429–444, Nov. 1978.
[11] P. Papadakis, I. Pratikakis, T.
Theoharis, and S. Perantonis, “PANORAMA: A 3D Shape Descriptor Based on
Panoramic Views for Unsupervised 3D Object Retrieval,” International Journal of
Computer Vision, vol. 89, no. 2–3, pp. 177–192, Sep. 2010.
[12] D.-Y. Chen, X.-P. Tian, Y.-T.
Shen, and M. Ouhyoung, “On Visual Similarity Based 3D Model Retrieval,” Computer
Graphics Forum, vol. 22, no. 3, pp. 223–232, Sep. 2003.
[13] I. Atmosukarto and L. G. Shapiro,
“3D object retrieval using salient views,” International Journal of Multimedia
Information Retrieval, vol. 2, no. 2, pp. 103–115, Jun. 2013.
[14] J. J. Koenderink and A. J. van
Doorn, “Surface shape and curvature scales,” Image and Vision Computing, 1992.
[15] L. Shapira, A. Shamir, and D.
Cohen-Or, “Consistent mesh partitioning and skeletonisation using the shape
diameter function,” The Visual Computer, vol. 24, no. 4, pp. 249–259, Apr.
2008.
[16] P. Shilane, P. Min, M. Kazhdan,
and T. Funkhouser, “The princeton shape benchmark,” in Proceedings Shape
Modeling Applications, 2004., 2004, pp. 167–388.
[17] D. V. Vranic, “3D Model
Retrieval,” Ph.D. thesis, University of Leipzig, 2004.
[18] R. Fang, A. Godil, X. Li, and A.
Wagan, “A new shape benchmark for 3D object retrieval,” in Lecture Notes in
Computer Science (including subseries Lecture Notes in Artificial Intelligence
and Lecture Notes in Bioinformatics), 2008.
[19] X. Chen, A. Golovinskiy, and T.
Funkhouser, “A benchmark for 3D mesh segmentation,” ACM Transactions on
Graphics, vol. 28, no. 3, p. 1, 2009.
[20] D. Giorgi, D. Giorgi, S. Biasotti,
and L. Paraboschi, “SHape REtrieval Contest 2007: Watertight Models Track.”
[21] G. Ioannakis, A. Koutsoudis, I.
Pratikakis, and C. Chamzas, “RETRIEVAL—An Online Performance Evaluation Tool
for Information Retrieval Methods,” IEEE Transactions on Multimedia, vol. 20,
no. 1, pp. 119–127, Jan. 2018.
