Thin-shell
structure (or shell) is a body bounded by two curved surfaces, the greatest
distance between which is much less than any other size. (Fig. 1). Great
attention is paid to studies on shells since such structures are highly strong
and stiff and have a variety of design shapes [1], [2]. Thin-shell structures
are often used in shipbuilding, aircraft and spacecraft construction,
mechanical and civil engineering.
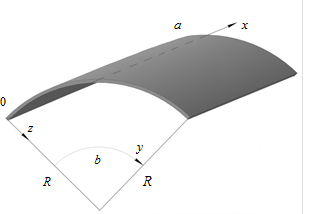
Fig. 1. Thin-walled shell
structure
During
operation shell structures are subjected to various influences (mechanical
static loads, vibrations, shock loads, temperature effects, etc.) and can also
exhibit various properties (loss of stability, plastic deformation, material
creep, etc.). Thereat, a wide class of problems arises that require research. The
capabilities of modern computer hardware make it possible to perform
calculations with high accuracy and consideration of complex nonlinear effects.
The
current state of different shell theory branches be found in review articles [3-8].
Although
the visualization of complex engineering processes is very important [9], the
issues of shell visualization have not been solved in full. The research on
shells often covers only the stress-strain state (hereinafter — the SSS)
of a shell structure relative to the middle surface (Fig. 2), while
deformations in the global coordinates are not considered. The middle surface
of a shell is the locus of points equidistant from the two surfaces that form
this shell. Although such software packages as ANSYS and LIRA-SAPR enable
graphic visualization of deformations, there is no standard technique or
algorithm of visualization of deformed shells for variational analysis methods
which are widely used in shell modeling [10-12]. In the meantime, the use of
variational methods such as the Ritz method can significantly improve the
accuracy of the analysis and reduce its time [2].
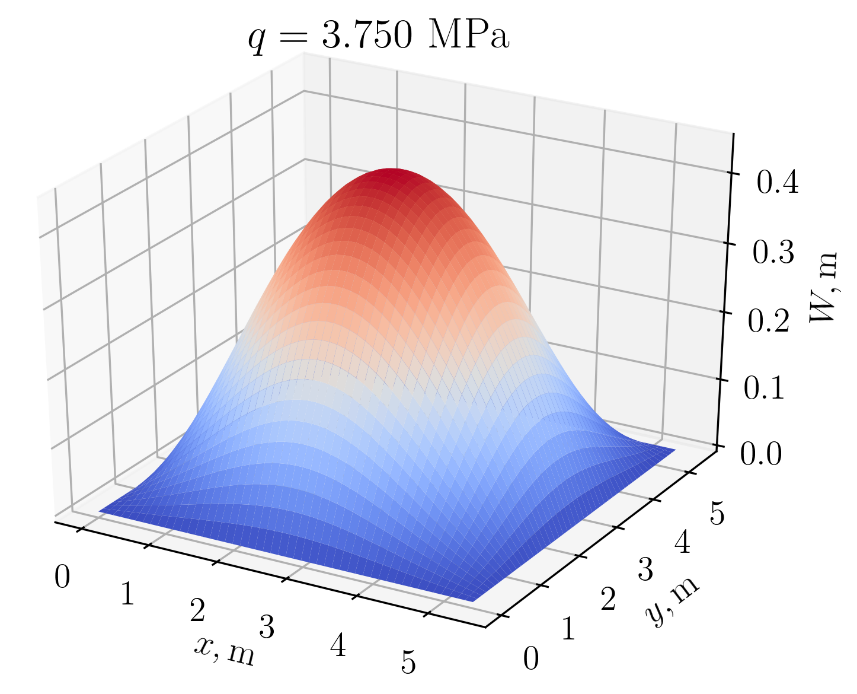
Fig. 2.
Visualization of vertical displacements relative to the middle surface
Informative
visualization of the SSS of shells is important for their detailed study [13]. In
many cases, a researcher will examine the analysis data more efficiently if
they are presented as a 3D animation rather than static contoured maps or 2D
graphs. For example, using the shell structure’s stress-strain state 3D visualization
it is possible to verify the results of calculations with field experiments [14].
VR
and AR technologies are particularly important in this context [15, 16].
Virtual reality gives a 3D representation of structural deformations. This
allows visualizing the change in shell geometry more accurately relatively to
its original dimensions. Augmented reality makes it possible to see the
structure in the real world, which is also useful for studies on shell
structures. For example, augmented reality allows visualizeing the 3D-model of
the deformed shell on top of a paper report of its SSS study. This provides theo
significant increase in the information on used documentation tools.
The
purpose of this study is to develop a software package (hereinafter — the
SP) for the analysis of the SSS and visualization of shell structures using VR
and AR technologies. To achieve this purpose, different problems were solved:
A
mathematical model of the thin-shell structure geometric data was formed. This
model defines shell geometry in the global coordinate system and allows the
addition of deformation data obtained during SSS calculation.
A
software package has been implemented that generates geometry based on the
calculation results. It allows visualizing various fields of SSS and provides
standard elements for visualizing 3D graphs (such as coordinate axes and heat
maps).
The
software package consists of two modules: the SSS analysis module and the
visualization module. The SP architecture is shown in Fig. 3.
The
analysis module performs shell structure SSS analysis that is based on the
functional of the total strain energy using GPU. The Ritz method [2] is used
for the numerical solution of the variational problem. This method reduces the
problem of minimizing the functional to the problem of minimizing the function
of multiple variables. The results of the SSS analysis that fully describe the
deformation of the shell structure in all its points are the coefficients of
approximation functions that provide the functional minimum. The analysis data
can be exported by means of JSON files for subsequent visualization in the
visualization module.
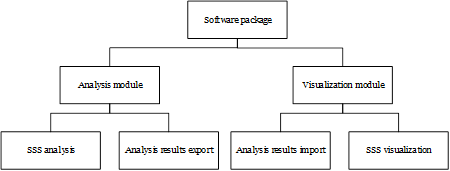
Fig. 3. Software
package for shell analysis
The
visualization module deserializes the file with the SSS analysis data, performs
procedural generation of the geometry of the shell structure, and, then,
visualizes the SSS through either heat maps presented over the shell or through
changing the geometry of the shell structure.
The
main feature of the described solution is the ability to render shell SSS using
virtual and augmented reality technologies. Recently, there are no solutions
that allow visualizing the calculation results stored in standard formats (such
as VTK) on mobile augmented or virtual reality platforms. For this reason,
existing renderers (such as ParaView) couldn’t be used and a custom rendering
solution was developed. Visualization module imports the analysis results in
custom data format used for SSS data storage in the analysis module because
using other data formats doesn’t provide benefits within the investigated
problem.
Analysis
of the SSS of a shell structure means minimization of the functional of the
total potential strain energy (which is a sum of the work of internal and
external forces) in the Timoshenko (Reissner–Mindlin) model. The Ritz method is
used for numerical search for the functional minimum. It reduces the
variational problem to a problem of unconstrained optimization of the function
of several variables. For this purpose, the required displacements functions
 as well as functions of normal segment
turning angles to the middle surface
as well as functions of normal segment
turning angles to the middle surface
 are replaced with the
following approximations:
are replaced with the
following approximations:
where
approximation functions
 are known and
predetermined by the conditions of shell fixing, and parameters
are known and
predetermined by the conditions of shell fixing, and parameters
 are unknown numeric coefficients;
are unknown numeric coefficients;
 –
is the quantity of expansion terms.
–
is the quantity of expansion terms.
Thus,
the functional
 (complete expression is given in [2,
17]) is approximated by the function of several variables, and it is sufficient
to use the approximation functions and the numeric coefficients’ values
ensuring the minimum of the functional to recover the SSS analysis data.
(complete expression is given in [2,
17]) is approximated by the function of several variables, and it is sufficient
to use the approximation functions and the numeric coefficients’ values
ensuring the minimum of the functional to recover the SSS analysis data.
When
using variational principles for making a mathematical model, the geometry of a
shell structure is found through Lame parameters and principal curvatures.
However, it does not seem too comfortable to make a curvilinear coordinate
system to generate the geometry of a shell structure based on these parameters
only. Papers dealing with shell visualization [18] suggest using a parametric
notation for shell structures instead.
Many
shells can be described in the parametric form, which relates each of the
points of the middle surface in a 2D space to a point in a 3D coordinate
system. Therefore, the question of how deformations are applied to the shell
middle surface should be solved. In this paper, the local basis in each point
of the middle surface is used to solve this problem, which makes it possible to
use displacements in the global coordinates instead of displacements
relative to the middle surface. We build
the geometry of a shell with a certain thickness
h, ratios for
displacements in an arbitrary layer of the shell from the Timoshenko model that
is a base for the analysis for the middle surface.
Let
us describe a parametric shell in a generalized form below. Each point of such
a shell is determined through the following ratios:
|

|
(2)
|
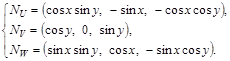
To
apply deformations, i.e. displacement of the points in a horizontal, vertical
and normal directions, to such a geometry, we need to find vectors
 ,
,
 for each point of the
shell, after which they should be normalized. These vectors determine the
horizontal and vertical directions of displacement of the points, respectively.
The vector product of these normalized vectors is the normal to the surface of
the shell in the point
for each point of the
shell, after which they should be normalized. These vectors determine the
horizontal and vertical directions of displacement of the points, respectively.
The vector product of these normalized vectors is the normal to the surface of
the shell in the point
 .
Sign of the normal vector is
defined so that it shows the direction from the inside-out. Analytical
expressions of the basis of these vectors are derived for various types of
shell structures in this paper.
.
Sign of the normal vector is
defined so that it shows the direction from the inside-out. Analytical
expressions of the basis of these vectors are derived for various types of
shell structures in this paper.
The
input parameters of a doubly curved shallow shell are linear dimensions
a,
b, and radii of circular arcs
 .
Let us introduce
additional parameters
.
Let us introduce
additional parameters
 and
and
 . In this
case, the parametric form for this shell will be as follows:
. In this
case, the parametric form for this shell will be as follows:
|
|
(3)
|
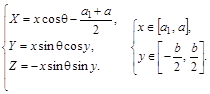
where
x
is the turning angle of a small radius;
y
is the turning angle
of a large radius
.
The
expression for the basis in each point of the shell is as follows:
|
|
(4)
|
The
middle surface of a shallow shell is given in Fig. 4.
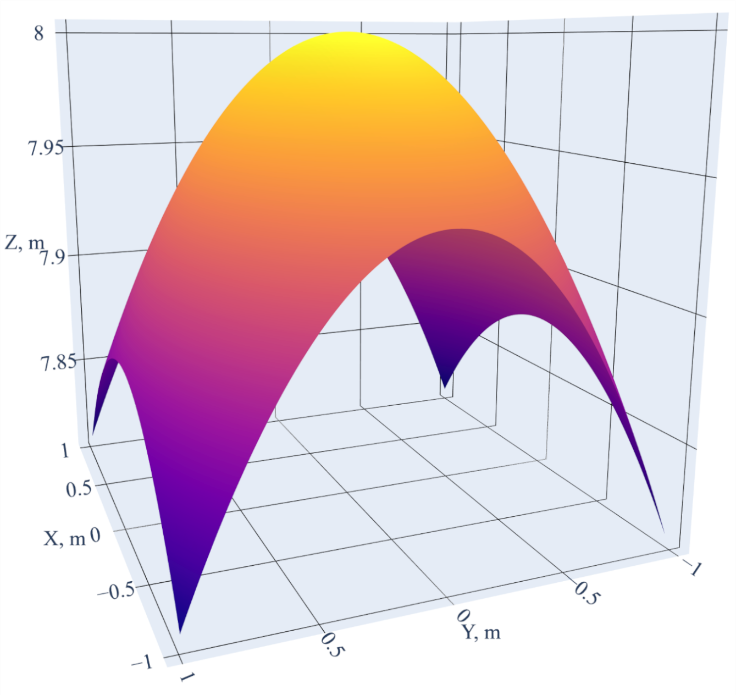
Fig. 4. Middle
surface of a doubly curved shallow shell
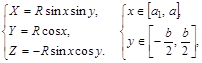
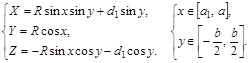
The
input parameters of a spherical shell are linear parameters
a,
a1,
b
and radius
R. The parametric form of a spherical shell is as
follows:
|
|
(5)
|
where
x
and
y
coincide with the latitude and longitude, respectively.
The basis in the point of the middle surface is determined as follows:
|
|
(6)
|
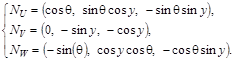
The
appearance of the middle surface of a spherical shell is given in Fig. 5.
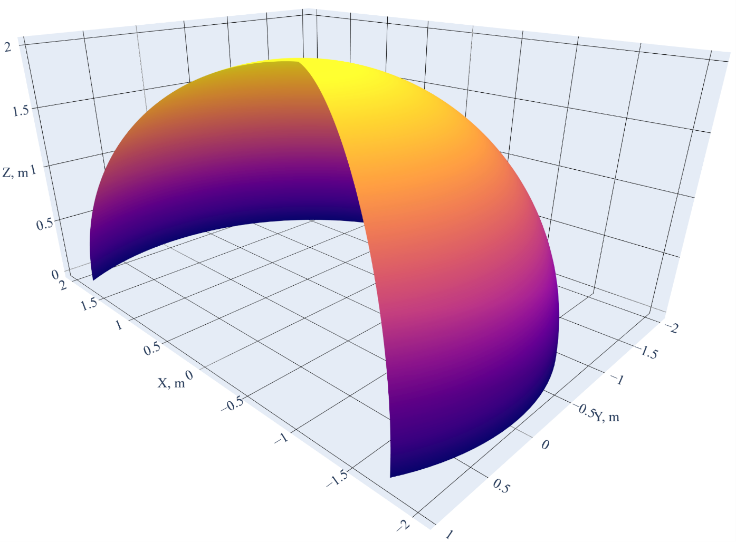
Fig. 5. Middle
surface of a spherical shell
The
model of a toroid-shape shell coincides with the model of a spherical shell but
includes displacement
d1
from the vertical axis of rotation
of the sphere. The parametric form of a toroid-shape shell is as follows:
|
|
(7)
|
The
basis in the point of the middle surface is determined as follows:
|
|
(8)
|
The
appearance of the middle surface of a toroid-shape shell is given in Fig. 6.
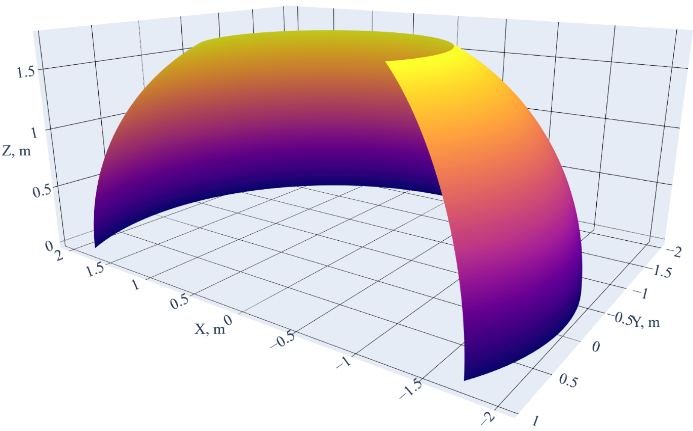
Fig. 6. Middle
surface of a toroid-shape shell
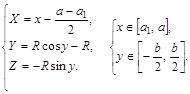
The
input parameters of a cylindrical shell are linear dimensions
a,
a1,
b
and radius
R. The parametric form of a cylindrical shell is as
follows:
|
|
(9)
|
Curvilinear
coordinate
x
is along the element, while curvilinear coordinate
y
is along the circle made by the cross-section of the cylinder with a plane
parallel to its base.
The
basis in an arbitrary point of the middle surface is as follows:
|
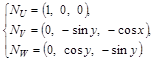
|
(10)
|
The
appearance of the middle surface of a cylindrical shell is given in Fig. 7.
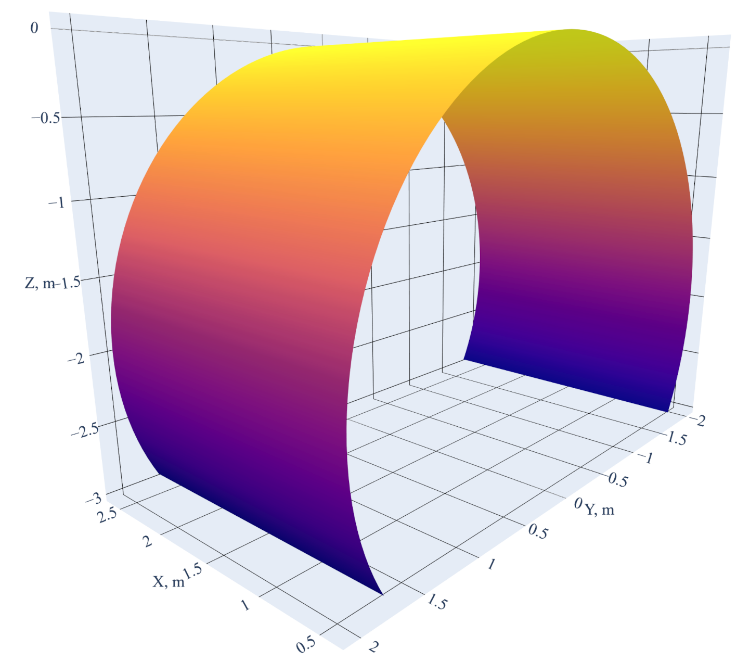
Fig. 7. Middle
surface of a cylindrical shell
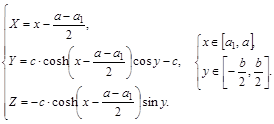
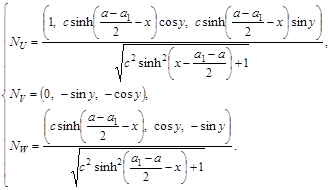
The
input parameters of a catenoid shell are linear dimensions
a,
a1,
b
and parameter
c. The parametric form of a catenoid shell is as
follows:
|
|
(11)
|
The
basis for such a shell takes the following form:
|
|
(12)
|
The
appearance of the middle surface of a catenoid shell is given in Fig. 8.
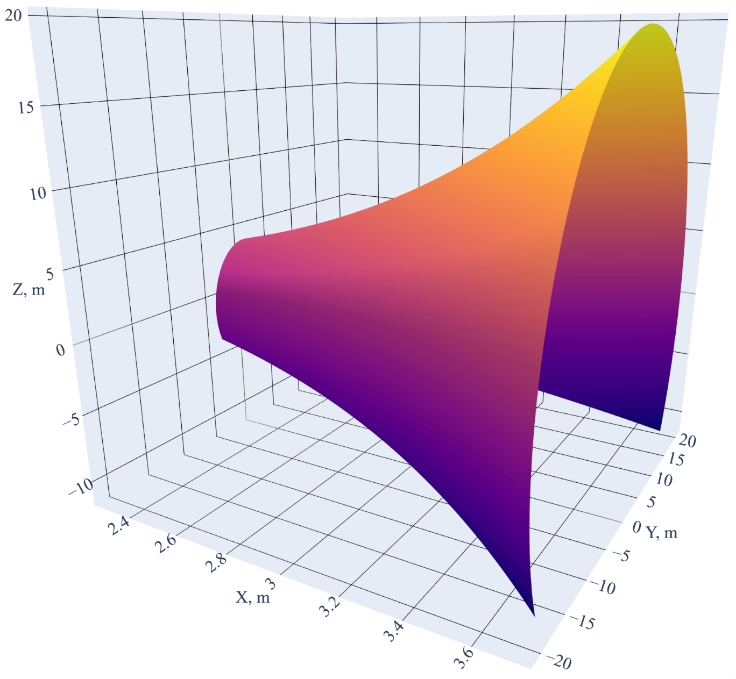
Fig. 8. Middle
surface of a catenoid shell
The
input parameters of a conical shell are linear dimensions
a,
a1,
b. The parametric form of a conical shell is as follows:
|
|
(13)
|
Curvilinear
coordinate
x
is along the element, while curvilinear coordinate
y
is along the circle made by the cross-section of the cone with a plane parallel
to its base.
The
basis for a conical shell is as follows:
|
|
(14)
|
The
appearance of the middle surface of a conical shell is given in Fig. 9.
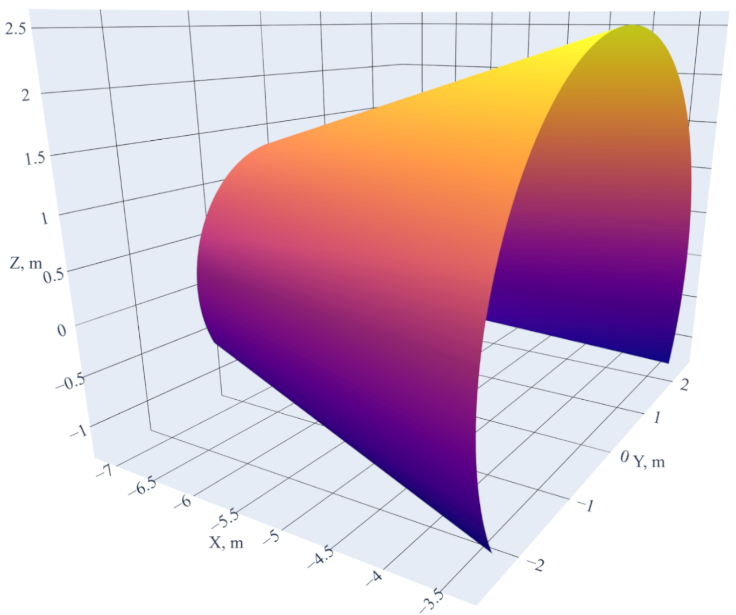
Fig. 9. Middle
surface of a conical shell
After
the determination of shell’s middle surface parametric form and it’s local
basis at each point, it is possible to build a deformed structure in the global
coordinate system.
Let
 be a point of shell’s middle surface. Then
the coordinates of this point after shell loading and the following deformation
be a point of shell’s middle surface. Then
the coordinates of this point after shell loading and the following deformation
 is defined as follows:
is defined as follows:
|

|
(15)
|
where
the negative sign in front of the term responsible for the vertical component
of deformation is due to the positive direction of the shell deflection.
Formula
(15) allows constructing the deformed geometry of shell’s middle surface. In
order to move from middle surface to bulk body, it is necessary to determine
how various layers of shell are deformed.
According
to Timoshenko-Reisner model, during deformation a rectilinear shell element,
initially normal to middle surface, remains rectilinear, but not necessarily
normal. In this case, the displacements in the layer spaced
z
from the middle
surface have the form:
|

|
(16)
|
where
 are the
rotation angles of segment normal to the middle surface in sections
are the
rotation angles of segment normal to the middle surface in sections
 and
and
 respectively.
Fig. 10 shows the results of shell visualization with zero thickness (i.e,
visualization of the middle surface) and with thickness equal to 0.09 m.
respectively.
Fig. 10 shows the results of shell visualization with zero thickness (i.e,
visualization of the middle surface) and with thickness equal to 0.09 m.
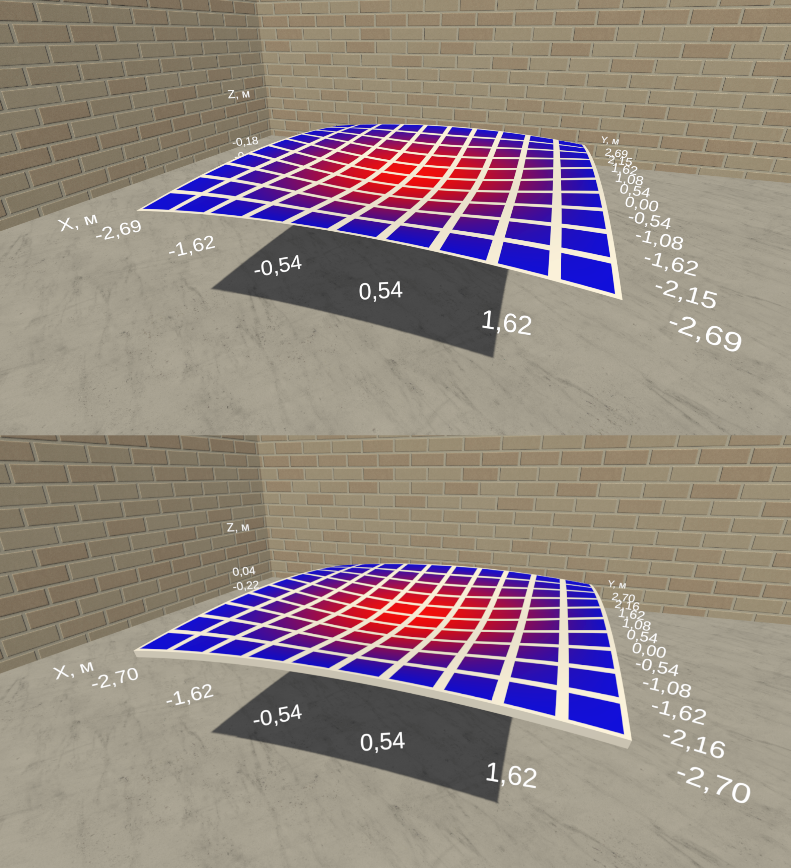
Fig. 10. Shell
visualization with zero thickness (top) and with thickness equal to 0.09 m
(bottom).
To
implement the shell visualization module that uses VR and AR technologies, the
interactive visualization environment Unity 2019.3 and C# programming language
were used. The interactive visualization module makes a 3D image of a shell
structure and visualizes the SSS either through heat maps over the shell or
through the changes in the shell geometry that depend on the shell type, its
geometric characteristics, and SSS analysis data (transferred to the
visualization module by means of a JSON file).
In
order to generate geometry for different types of shells, the following
software architecture is proposed. The logic associated with procedural mesh generation
is located in abstract class ShellGeometryGenerator. This class includes
methods for generating bulk body’s mesh, considering it’s SSS. Child classes of
this abstract class must implement methods that describe the middle surface of
the shell parametrically. Thus, to visualize any type of shell construction not
considered in this work, it is sufficient to describe its parametric form.
While
working on the visualization module, the authors developed a system of
components that makes it possible to visualize any 3D surface with coordinate
axes (including numbers with a pitch determined automatically), visualize heat
maps with a graduated scale, visualize a mesh over the graph to improve the
perception of the surface deformations. The middle surface can also be deformed
via SSS analysis data.
There
is an option of using the proposed module without SSS visualization. This
visualization mode can be useful to architects when they examine various forms
of structures and to students studying shell structures. This allows for a
better understanding of a relationship between the parameters of a shell
structure and its final appearance.
Visualization
module supports virtual reality devices Oculus Rift, HTC Vive, etc.), mobile
virtual reality devices (Oculus Quest) and Android mobile devices that support
ARCore technology.
The
SP for visualization of shell structures was tested for shells of various
shapes and using various visualization options. Fig. 11 provides a
demonstration of the SSS of a shell structure using heat maps and geometry
changes.
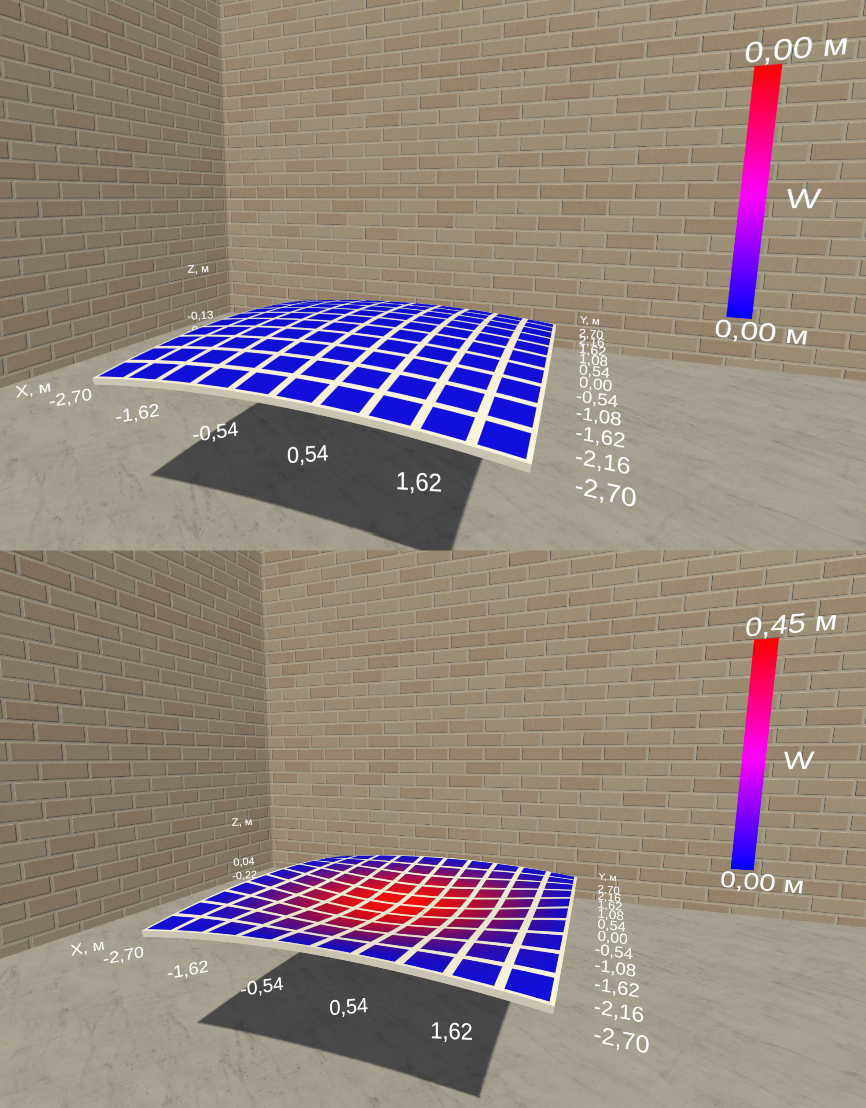
Fig. 11. Shell
before (top) and after (bottom) applying the load
As
follows from Fig. 11, visualization has great information capacity and
describes data on the shell deformation both visually and numerically. The
suggested visualization module helps to study the shell SSS in real-world scale
with the initial proportions preserved. The clarity of such visualization in
comparison to traditional visualization of the deflection relative to the
middle surface (Fig. 2) is obvious.
As
stated above, the suggested visualization module not only makes it possible to
visualize the shell SSS but also can be used by students studying procedural
modeling in architecture allowing them to clearly depict shell structures
depending on their geometric parameters. Fig. 12 presents a shallow shell
with lesser curvature radii and larger linear dimensions than those in Fig. 10.
As you can see, a change in geometric parameters of shells of the same type can
lead to significant changes in the final shape.
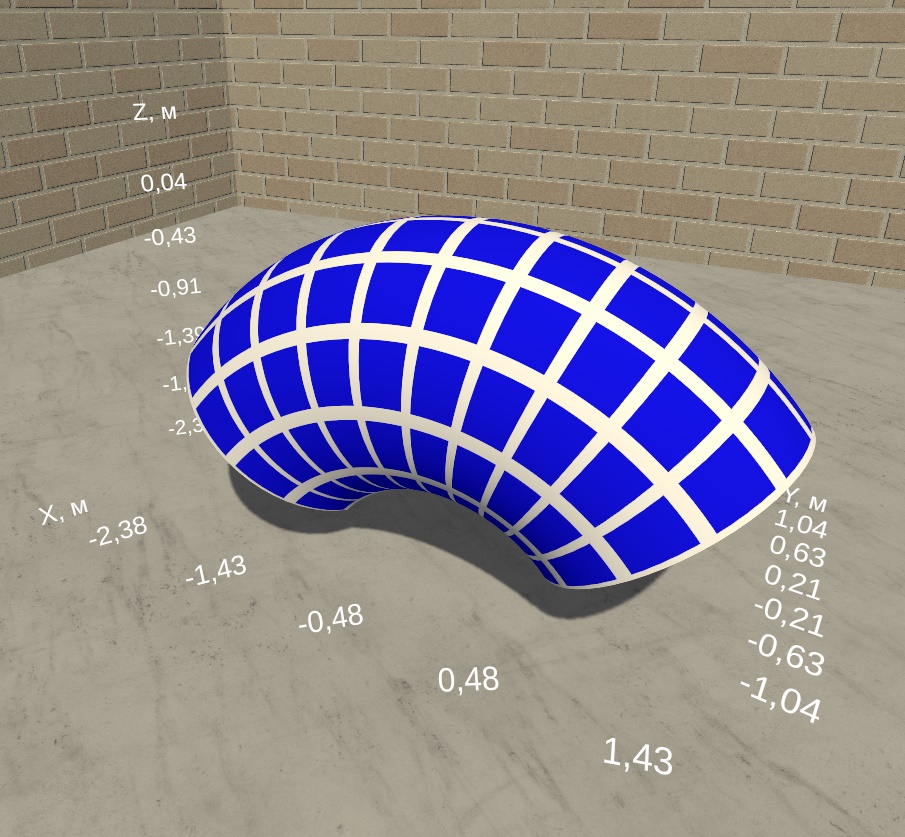
Fig. 12.
Visualization of a shell with a small radius of rotation
The
visualization module implements VR and AR technologies. AR visualization is
demonstrated in Fig. 13. Such visualization can be used in cases where it
is required to visually demonstrate the coincidence or non-coincidence between
physical and mathematical modeling results. Also, augmented reality
visualization can be used in the preparation of textbooks or reports on the
study of shell SSS.
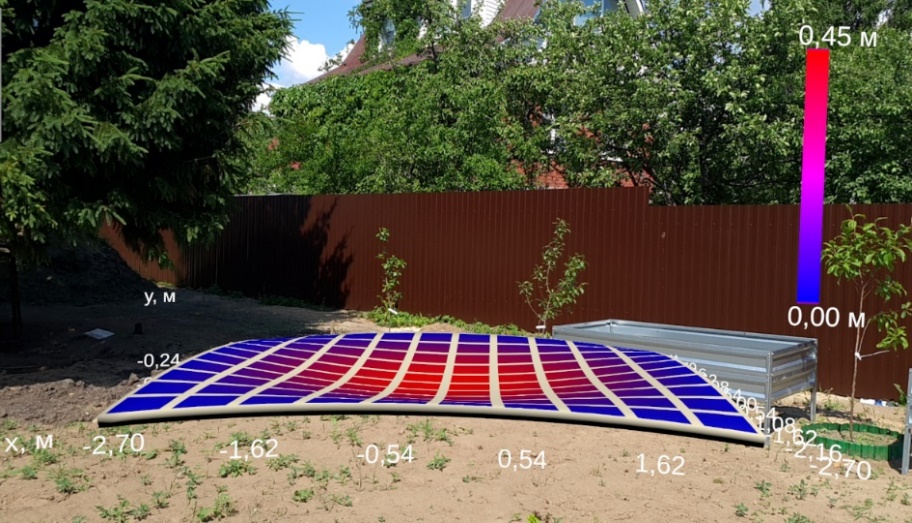
Fig. 13. AR
visualization of a shell
It
is planned to extend the functionality of the developed SC in the following
directions:
• Allowing
the user to define more complex types of shells, such as cutout shells.
• Implementing
more accurate deformation models in different layers of the shell.
• Extending
functionality of the SC (implementation of interactive cursors,
three-dimensional grid graphics, etc.).
Thus,
a mathematical model was developed that allows visualization of the SSS of shell
structure determined by solving the variational problem. This mathematical
model is implemented in the form of cross-platform software complex which
allows the visualization of SSS with the use of virtual and augmented reality
technologies. Currently, there are no other works describing the visualization
of shell SSS by using these technologies.
The
developed solution can be used as a tool for informative and clear
visualization of the shell SSS, as a documenting tool or when training students
majoring in architecture and civil engineering in courses on thin-shell
structures.
The
research was supported by RSF (project No. 18-19-00474).
1.
Solovei N.A.,
Krivenko O.P., Malygina O.A.: Finite element models for the analysis of
nonlinear deformation of shells stepwise-variable thickness with holes,
channels and cavities // Magazine of Civil Engineering, Vol. 53, № 1,
2015, pp. 56–69 (doi:10.5862/MCE.53.6)
(https://engstroy.spbstu.ru/en/article/2015.53.6/)
2.
Karpov V.V.:
Strength and stability of reinforced shells of rotation. In two parts. Part 1.
Models and algorithms for studying the strength and stability of reinforced
shells of rotation // Fizmatlit, Moscow, 2010.
3.
Godoy L. A.
Buckling of vertical oil storage steel tanks: Review of static buckling studies
// Thin-Walled Structures. Vol. 103, 2016, pp. 1–21 (doi:10.1016/j.tws.2016.01.026)
(https://www.sciencedirect.com/science/article/abs/pii/S026382311630026X)
4.
Kumar P.,
Srinivasa C. On buckling and free vibration studies of sandwich plates and
cylindrical shells: A review // Journal of Thermoplastic Composite Materials.
Vol.
33,
№ 5, 2020,
pp. 673–724 (doi:10.1177/0892705718809810) (https://journals.sagepub.com/doi/10.1177/0892705718809810)
5.
Qatu M. S.,
Asadi E., Wang W. Review of Recent Literature on Static Analyses of Composite
Shells: 2000-2010 // Open Journal of Composite Materials. Vol. 2, № 3.
2012, pp. 61–86 (doi:10.4236/ojcm.2012.23009)
(https://www.scirp.org/journal/paperinformation.aspx?paperid=21295)
6.
Alijani F.,
Amabili M. Non-linear vibrations of shells: A literature review from 2003 to
2013 // International Journal of Non-Linear Mechanics. Vol. 58, 2014, pp. 233–257
(doi:10.1016/j.ijnonlinmec.2013.09.012)
(https://www.sciencedirect.com/science/article/abs/pii/S0020746213001868).
7.
Maksimyuk V.
A., Storozhuk E. A., Chernyshenko I. S. Variational finite-difference methods
in linear and nonlinear problems of the deformation of metallic and composite
shells (review) // International Applied Mechanics, Vol. 48, № 6, 2012,
pp. 613–687 (doi:10.1007/s10778-012-0544-8).
8.
Thai H.-T.,
Kim S.-E. A review of theories for the modeling and analysis of functionally
graded plates and shells // Composite Structures, Vol. 128, 2015, pp. 70–86.
(doi:10.1016/j.compstruct.2015.03.010)
(https://www.sciencedirect.com/science/article/pii/S0263822315001828).
9.
Zheleznyakova
E.A., Osintsev A.V. Determination natural frequencies and mode shapes imaging
element structures. Scientific Visualization, Vol. 10, № 3, 2018, pp. 45–57
(doi:10.26583/sv.10.3.03) (http://sv-journal.org/2018-3/03/?lang=en)
10.
Chai Y., Song Z., Li F.
Investigations on the aerothermoelastic properties of composite laminated
cylindrical shells with elastic boundaries in supersonic airflow based on the
Rayleigh–Ritz method. Aerospace Science and Technology, Vol. 82, 2018, pp. 534-544
(doi:10.1016/j.ast.2018.09.040)
(https://www.sciencedirect.com/science/article/abs/pii/S1270963818306102)
11.
Deng J.,
Guasch O., Maxit L., Zheng L. Vibration of cylindrical shells with embedded
annular acoustic black holes using the Rayleigh-Ritz method with Gaussian basis
functions. Mechanical Systems and Signal Processing, Vol. 150, 2021,
107225 (doi:10.1016/j.ymssp.2020.107225)
(https://www.sciencedirect.com/science/article/abs/pii/S0888327020306117)
12.
Senjanović I.,
Alujević N., Ćatipović I., Čakmak D., Vladimir N. Vibration
analysis of rotating toroidal shell by the Rayleigh-Ritz method and Fourier
series. Engineering Structures, Vol. 173, 2018, pp. 870-891 (doi:10.1016/j.engstruct.2018.07.029)
(https://www.sciencedirect.com/science/article/abs/pii/S0141029617332534)
13.
Pilyugin V.V.,
Milman I. Visual analytics and its use in the NRNU MEPhI “Scientific
Visualization” laboratory activities. Scientific Visualization, Vol. 11, № 5,
2019, pp. 46–55 (doi:10.26583/sv.11.5.05)
(http://sv-journal.org/2019-5/05/).
14.
Kashevarova G.G.,
Martirosyan A.S., Travush V.I. Use of imaging in the forecasts of composite
columns damage with stiff reinforcement. Scientific Visualization, Vol. 7,
№ 5, 2015, pp. 122–141 (http://sv-journal.org/2015-5/10.php?lang=en)
15.
Van Dam, A.,
Forsberg, A. S., Laidlaw, D. H., LaViola, J. J., Simpson, R. M. Immersive VR
for scientific visualization: A progress report. IEEE Computer Graphics and
Applications, Vol. 20, № 6, 2000, pp. 26-52
(https://ieeexplore.ieee.org/abstract/document/888006)
16.
Vinokur A.I., Kondratiev
N.V., Ovechkis Yu.N. The research of the stereoscopic characteristics of
virtual reality helmets // Scientific visualization, Vol. 12, № 1, 2020, pp. 61–69
(doi:10.26583/sv.12.1.05) (http://sv-journal.org/2020-1/05/?lang=en).
17.
Semenov A. A.
Strength and stability of geometrically nonlinear orthotropic shell structures
// Thin-Walled Structures, Vol. 106, 2016, pp. 428–436, (doi:10.1016/j.tws.2016.05.018)
(https://www.sciencedirect.com/science/article/abs/pii/S0263823116302816).
18.
Aseev A.V., Makarov
A.A., Semenov A.A.: Visualization of the stress-strain state of thin-walled
ribbed shells. Bulletin of Civil Engineers, Vol. 3, 2013, pp. 226–232.
