The physical
experiment was the main and often the only source of information on the
problems of gas dynamics long before the advent of the computer age. In
practice, the main goal of a physical experiment was almost always not to model
the physical phenomenon itself, but to clarify the circumstances under which it
occurs, i.e. obtaining the dependence of the appearance of the phenomenon on
the determining parameters of the problem, such as Mach numbers, Reynolds numbers,
Prandtl numbers, and the geometric parameters of the problem. Such large-scale
experimental work made it possible to obtain key relationships for the
dependence of the gasdynamic functions of interest or the conditions for the
appearance of a physical effect on the key determining parameters. In fact, the
establishment of such physical laws for shock waves, separated flows,
characteristic configurations of streamlined bodies was the main task of fluid
and gas mechanics.
As an example of
such a dependence, one can cite the famous formula of G.I. Petrov, representing
the fundamental law on the ultimate pressure drop in the shock, which the
turbulent boundary layer is able to withstand without detachment from the wall
[1]:
P2 / P1 = 0.713Me + 0.213.
Here P2
/ P1 is the pressure drop, Me is the Mach
number before the separation point, varying from 1.5 to 4.
Another example is
the famous Kozlov formula [2], which represents the dependence of surface
friction on Mach numbers, Reynolds numbers and the temperature factor:
 .
.
Here  , Rew is the coefficient
of surface friction and the Reynolds number calculated with reference to the
wall temperature, Te is the temperature at the outer boundary
of the boundary layer, and Twe is the temperature factor.
, Rew is the coefficient
of surface friction and the Reynolds number calculated with reference to the
wall temperature, Te is the temperature at the outer boundary
of the boundary layer, and Twe is the temperature factor.
The advent of
computer technology allowed solving the problems of mathematical modeling of
currents, which sharply reduced the need for large-scale physical experiments.
However, in the problems of mathematical modeling, the main tendency of
carrying out series of calculations with the variation of the defining
parameters of the problem also remained. The main goal was the same – to
determine the conditions for the appearance of a physical phenomenon when the external
conditions of the problem are varied. An example of such approach is described
in article [8], which presents a series of numerical experiments on the flow of
a backward ledge by a viscous gas flow. As a result of the experiments, a
generalized formula is obtained that represents the characteristic time of the
establishment of the flow as a function of the Mach and Reynolds numbers of the
external flow.
Before the advent
of parallel computing technologies, such calculations were difficult to
implement and they were quite rare. However, they were the prototype of the generalized
computational experiment.
The generalized
computational experiment is based on solving direct and inverse problems of
mathematical modeling. These tasks can be considered in a parametric and
optimization setting. Problem solving is carried out using parallel
technologies in multitasking mode. Numerical solutions are volumes of
multidimensional data. To process and analyze this data, it is necessary to
apply the methods of Data Analysis and Visual Analytics. The construction of a
generalized computational experiment makes it possible to obtain a solution not
for one, separately taken problem, but for a whole class of problems. The class
of problems is determined in the ranges of variation of the defining parameters
of the problem, such as characteristic numbers (Mach, Reynolds, Strouhal
numbers, etc.) and geometric characteristics. In a practical sense, this makes
it possible to reveal hidden dependences of valuable functionals on the
determining parameters of the problem, similar to the above formulas. This work
continues a series of works devoted to the development and implementation of a
generalized computational experiment for various classes of computational
aerodynamics problems [3-14].
Despite the fact
that there are very few works devoted to the development of a generalized
computational experiment, the development of such experiments is gradually
taking place in many areas. First of all, tools are being developed to implement
such experiments in many software packages for solving optimization problems.
Here we can cite as an example the work [15], where algorithms are implemented
that allow a generalized computational experiment in such fields as seismic
exploration, plasma physics and turbid media optics, solving fundamental and
applied problems of studying magnetic materials and creating spintronics
devices, simulation of field development for the oil reservoir that contains
kerogen with in-situ combustion taken into account, simulation of poroelastic
medium problems and hydraulic fracture problems.
The development of
technologies and software tools for constructing a generalized computational
experiment occurs as the modern development of mathematical methods and
high-performance computing tools. Two main reasons should be pointed out as the
main factors determining the possibility of efficiently constructing a
generalized computational experiment.
The first of these
is the emergence of high-performance computing clusters and parallel
technologies. It is generally accepted that parallel technologies provide a)
the ability of fast computing and b) the ability to use detailed computational
grids. However, parallel technologies also provide researchers with another
crucial opportunity. This is an opportunity of parallel calculation of the same
problem with different input data in multitask mode. From the point of view of
the author, this possibility is not yet fully appreciated. This possibility
allows one to effectively solve parametric and optimization problems and
construct a generalized computational experiment.
The second reason
is the intensive development of methods and approaches for processing and visualization
of multidimensional data. The results of a generalized computational experiment
in the form of discrete multidimensional arrays need processing and analysis in
order to obtain hidden interdependencies between the determining factors in the
class of problems that interest the researcher.
A generalized
numerical experiment involves splitting each of the defining parameters of a
problem within a certain range. A grid decomposition is formed for some
multidimensional parallelepiped composed of the defining parameters of the
considered problem of gas dynamics. For each point of this grid, the problem is
calculated in the space of the determining parameters. According to [5, 9],
this can be written as follows.
Suppose that there
is a reliable numerical method for solving two-dimensional and
three-dimensional nonstationary problems of computational gas dynamics. Then we
can obtain a numerical solution  for
any point in the space of a computational domain, where x, y, z are the
spatial coordinates, t is the time,
for
any point in the space of a computational domain, where x, y, z are the
spatial coordinates, t is the time,  are the defining parameters of the
problem. As defining parameters of the problem, we will keep in mind the
characteristic numbers describing the properties of the flow under
consideration, such as the Mach numbers, Reynolds, Prandtl, Strouhal, etc., and
the characteristic geometric parameters. Each of the characteristic parameters
is limited in a certain range
are the defining parameters of the
problem. As defining parameters of the problem, we will keep in mind the
characteristic numbers describing the properties of the flow under
consideration, such as the Mach numbers, Reynolds, Prandtl, Strouhal, etc., and
the characteristic geometric parameters. Each of the characteristic parameters
is limited in a certain range
 .
.
We divide each of
the parameters  into k-1 parts, so we obtain for
each parameter a partition consisting of k points. The volume of an N-dimensional
space formed by a set of defining parameters is filled with a set of
into k-1 parts, so we obtain for
each parameter a partition consisting of k points. The volume of an N-dimensional
space formed by a set of defining parameters is filled with a set of points.
points.
Denoting the point
from the given set, as  , we arrive at the fact that for each point
of the collection it is necessary to obtain a numerical solution of the
gas-dynamic problem
, we arrive at the fact that for each point
of the collection it is necessary to obtain a numerical solution of the
gas-dynamic problem  .
.
It is easy to see
that this will require solving  gasdynamic problems, which is impossible
without the use of parallel calculations in a multitask mode. In practice, the
number N usually does not exceed 5, which corresponds to the computing
capabilities at the current time.
gasdynamic problems, which is impossible
without the use of parallel calculations in a multitask mode. In practice, the
number N usually does not exceed 5, which corresponds to the computing
capabilities at the current time.
It should also be
noted that we formulated the classical problem of parametric study. Parametric
numerical studies allow one to obtain a solution not for one particular
mathematical modeling problem, but for a class of problems defined in a
multidimensional space of defining parameters. Also, such a formal formulation
allows numerical study of optimization analysis problems, when the inverse
problem is solved at each point of the grid partition of the multidimensional
space of the determining parameters. Both types of similar problems are
considered in a series of papers [3-14].
The only way to
effectively carry out a generalized numerical experiment is applying of
parallel computations. The problem of the optimal and effective way of parallelization
was thoroughly discussed in the papers [7, 8]. There were considered parts of
the whole algorithm for parameter optimization and analysis. For these parts
the main criterion of applicability for parallelizing is independence of
specific numerical method. From this point of view the most perspective way for
parallelizing is applying the approach of multitask parallelism using the
principle “one task – one process”. Due to minimal quantity of internal
exchanges between the processes we are able to create an effective practical
tool for generalized numerical experiment. We assume that k processes
are provided for parallel computation. The control process P0
creates the grid in the multidimensional space of determining parameters, then P0
forms tasks and sends the tasks to others processes and to itself also. After
task completion P0 collects the results and implements all
procedures defined by user, such as data processing and transformation. Due to
the absence of internal exchanges between the processes the procedure of
parallelizing amounts to creation of control interface for tasks distribution
and data collecting in one multidimensional array.
There are some
effective and easy ways to create such interface for parallel computations.
These ways use such computational technologies as MPI (Message Passing
Interface) [16] and DVM technology [17-22]. DVM technology [17-22] was
elaborated in Keldysh Institute of Applied Mathematics RAS. DVM-system provides
unified toolkit to develop parallel programs of scientific-technical
calculations in C and Fortran. Unified parallel model is built in C and Fortran
languages on the base of the constructions, that are "transparent"
for standard compilers, that allows to have single version of the program for
sequential and parallel execution. This way of code parallelizing allows one to
save a lot of human resources for coding and debugging. For both types of parallel
technologies special control interfaces for parameter optimization and analysis
were designed [7, 8].
With the help of
the constructed interfaces, a series of calculations were carried out,
realizing the concept of a generalized numerical experiment for various classes
of problems. The results of the calculations will be shown in the following
sections. Both developed interfaces are very versatile. They can be applied to
almost any software code for solving the CFD problem chosen as the base one.
According to [5-8],
as a result of implementing the construction of a generalized numerical
experiment and performing parallel calculations, we obtain a large data set
representing a set of numerical solutions  for
each point
for
each point  of the partition of the multidimensional
volume of the defining parameters
of the partition of the multidimensional
volume of the defining parameters  of the problem under consideration. This
volume in its original form is rather difficult to use, although its
availability for further purposes is necessary. In order to get useful
information from a calculated multidimensional data array, first of all we need
to reduce its dimension. By lowering its dimension, we are able to apply the
methods of visualization and visual analytics [23-26] in order to understand
the internal structure of the array and to reveal hidden interdependencies
between its defining factors. The revealed dependencies can be further
approximated by geometric primitives in order to obtain a generalizing
dependence, which will represent the solution of interest for a class of
problems. Examples of the implementation of this approach are presented in [5-14].
of the problem under consideration. This
volume in its original form is rather difficult to use, although its
availability for further purposes is necessary. In order to get useful
information from a calculated multidimensional data array, first of all we need
to reduce its dimension. By lowering its dimension, we are able to apply the
methods of visualization and visual analytics [23-26] in order to understand
the internal structure of the array and to reveal hidden interdependencies
between its defining factors. The revealed dependencies can be further
approximated by geometric primitives in order to obtain a generalizing
dependence, which will represent the solution of interest for a class of
problems. Examples of the implementation of this approach are presented in [5-14].
Also, to reduce
the dimension of a multidimensional array, methods of mapping into embedded
manifolds of smaller dimension are very effective [27-29]. Among them, the most
common method is the principal component method (PCA). The essence of the
method consists in the transition from the initial coordinate system to the new
orthogonal basis in the multidimensional space under consideration, whose axes
are oriented along the directions of maximum dispersion. The possible scheme of
working with an array in this case is the approximation by primitives of the
data array in the space of the first three main components and the subsequent
transition to the initial space of the determining parameters.
The results of a
generalized computational experiment, constructed as described in the previous
sections, represent a multidimensional amount of data. One of the most
effective tools to get the most information from this amount of data is a
visual presentation. Visualization problems arising in a generalized
computational experiment are described and systematized in dependence on the
types of data in [10].
As a result of a
generalized computational experiment, we obtain a numerical solution of the gas-dynamic
problem  for
each point of space at any time and for each point of partition of the space of
defining parameters
for
each point of space at any time and for each point of partition of the space of
defining parameters  . Here F is a vector of
gas-dynamic functions, such as pressure, density, temperature, velocity
components.
. Here F is a vector of
gas-dynamic functions, such as pressure, density, temperature, velocity
components.
According to [10],
one can define 3 types of visualization problems.
A) For each point
of the partitioning of the spatial countable domain (x, y, z) at the
moment of time t we have a whole set of solutions corresponding to
each point of the partition of the space of defining parameters. From a
practical point of view, the usefulness of such data is small, but such
information can be very useful in assessing the contribution of the determining
parameter  to the total variance at each point of the
computational domain and at any time moment. Here, for visualization at each
point, it is advisable to use a classic spider diagram with normalization to
the range of change of the determining parameter.
to the total variance at each point of the
computational domain and at any time moment. Here, for visualization at each
point, it is advisable to use a classic spider diagram with normalization to
the range of change of the determining parameter.
B) For each split
point of the space of defining parameters we have a calculated flow pattern in the
selected region of space (the calculated region). This makes it possible to
apply the entire rich set of scientific visualization methods and software [30,
31], developed earlier for gas dynamics problems. Possible types of informative
visual representations include:
- visualization
of scalar and vector fields in parallel sections of the computational domain
and cross-sections;
- animation of
scalar and vector fields in the constructed sections;
- construction of combined visual representations.
Such presentations
can be created for each fixed point of a partition of the space of defining
parameters . Here one has a new opportunity to
construct the boundaries of change of the defining parameters of interest from  to
to  for each . This can be useful, for example, in the
visualization of separation zones, where it is possible to single out the
limits of the change in the position of the separation zones, depending on the
choice of the determining parameter. Such visual presentations for a particular
class of problems can be created on the basis of already existing methods and
algorithms implemented in many software systems, such as ParaView [32], VizIt
[33], TecPlot [34].
for each . This can be useful, for example, in the
visualization of separation zones, where it is possible to single out the
limits of the change in the position of the separation zones, depending on the
choice of the determining parameter. Such visual presentations for a particular
class of problems can be created on the basis of already existing methods and
algorithms implemented in many software systems, such as ParaView [32], VizIt
[33], TecPlot [34].
C) From a
practical point of view, when solving problems of computational gas dynamics,
the primary interest to the user, as a rule, are valuable functionals
calculated using the already computed gas-dynamic functions in the
computational domain. The role of such a functional can be played by the total drag
coefficient of a body in the flow or the friction drag coefficient for viscous
problems. When analyzing the conditions for the emergence and decay of
space-time structures in a flow field, such a functional can be the
characteristic time of the structure's existence.
According to [10],
here we come to the classical tasks of visual analytics [23-28], where the goal
is to obtain maximum information about the multidimensional data array and
hidden relationships between its defining parameters. One of the possible
approaches presented in [9,35,36] is dimension reducing of the studied space of
defining parameters to three, the visual representation of dependence obtained
and approximation of this dependence using a set of geometric primitives. The
purpose of this approach is to represent the dependence in question in an
analytical form. If successful, this makes it possible to construct the
obtained results of mathematical modeling in the form of a physical law for the
class of problems in question.
This section
contains the examples of the generalized numerical experiment application to
some practical problems. It is applied in some variations due to different aims
for each class of problems.
The first example
of generalized numerical experiment is devoted to the problem of tuning the
properties of hybrid finite-difference schemes [12]. The paper [12] contains
the description of developed program tool Burgers2. This program tool is
intended for tuning and optimization of computational properties for hybrid
finite-difference schemes applied to Burgers equation. One-dimensional model
Burgers equation describes propagation of disturbances for dissipative medium.
The equation has exact solution, so it is widely used for tuning-up of
computational tools. Described program tool is based on combining of
optimization problem solution and visual data presentation. Visual
presentations of maximal error surface and error function are implemented as
program tool features. Users have possibility of creating hybrid
finite-difference schemes and analyzing computational properties for chosen
grid template provided by program tool. Visual presentation of optimization
problem solution allows finding of suitable weight coefficients for hybrid
finite-difference scheme under consideration. The user is able to make
simultaneous calculations varying weight coefficients in the scheme and
viscosity coefficient in Burgers equation. The user can make the calculations
simultaneously different sets of weight coefficients in accordance with the
concept of generalized numerical experiment. Figure 1 presents the surface of
absolute error for one of the hybrid scheme variants. The negative data area indicates where the
oscillations occur.
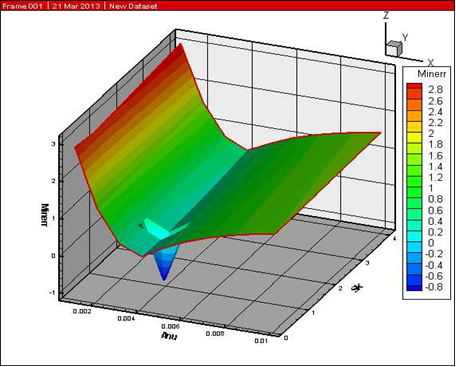
Fig. 1. Surface
of absolute error for Burgers equation test [12].
The following
example is also devoted to improving the computational properties of
finite-difference schemes. The problem of mathematical modelling of the flow in
the far wake behind the body is solved. In the general case, in a rectangular
computational domain, a viscous compressible heat-conducting gas flow is
considered, described by a complete system of time-dependent Navier-Stokes
equations. At the input boundary, the distributions of gas-dynamic parameters
are given, obtained from calculations of the flow around an axisymmetric body
and a portion of the track behind it. The main goal of the generalized
computational method was to thoroughly study the properties of artificial
viscosity incorporated in the hybrid difference scheme. For this purpose, we studied
the properties of the weight coefficients of the hybrid scheme on the example
of the problem of flow in the far wake and determined the limitations for the
weight coefficients. In this task, the following defining parameters were
varied, such as the steps of the grid decomposition in the x and y directions,
the weighting coefficients of the difference scheme, the Reynolds number of the
problem. As a result of the generalized computational experiment, a limit
surface was constructed for the dependence of the weight coefficient on the
other determining parameters of the problem. An example of the limiting surface
is presented in figure 2. When choosing the value of the weighting factor below
the surface, in the numerical solution, non-physical oscillations arise, which
can lead to the collapse of the solution. Such surfaces are constructed for
non-viscous and viscous flow. In the case of viscous flow, laminar and
turbulent regimes are considered.
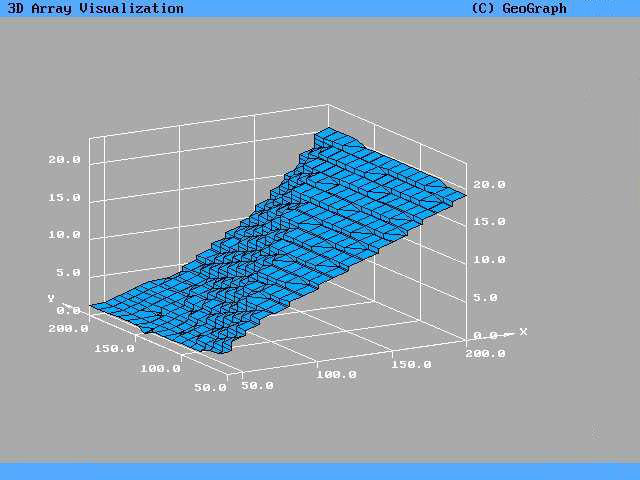
Fig. 2. Surface of absolute
error for far wake problem.
The next example
considers the problem of the evaluation of the accuracy for different numerical
methods. The problem of inviscid compressible flow around a cone at zero angle
of attack is used as a base one. The results obtained with the help of various OpenFOAM
solvers are compared with the known numerical solution of the problem with the
variation of cone angle and flow velocity [13]. Cone angle β changes from 10° to 35° in steps of 5°. Mach number varies from 2 to 7. For
comparison, four solvers were selected from the OpenFOAM software package: RhoCentralFoam,
SonicFoam, RhoPimpleFoam, RhoPimpleFoam. The results of such kind of
numericsl experiment were presented as errors in the form of an analog of the
L2 norm for all solvers. Figure 3 illustrates the results in a form of a change
in deviation from the exact solution for pressure depending on the cone angle
and the velocity for the solver rhoCentralFoam. Such changes were
obtained for all solvers.
Figure 3 shows a
multidimensional dataset for pressure obtained as a result of parametric
calculations in the space of the first three principal components. Yellow shows
the results for rhoCentralFoam solver, red for pisoCentralFoam,
green for sonicFoam and blue for rhoPimpleFoam.
Figure 3 shows
that the errors for rhoCentralFoam and for pisoCentralFoam can be
roughly approximated by a plane reflecting the dependence of the error on the
Mach number and cone angle. The results for sonicFoam and especially for
rhoPimpleFoam are significantly separated from the results for the first
two solvers due to their particular numerical characteristics. This methodical research can serve as a
basis for selecting the OpenFoam solver for calculating the inviscid supersonic
flow around the elongated bodies of rotation. The results of solvers comparison
can also be useful for developers of OpenFoam software content. The results
obtained made it possible to get a general idea of the calculation errors for
all solvers.
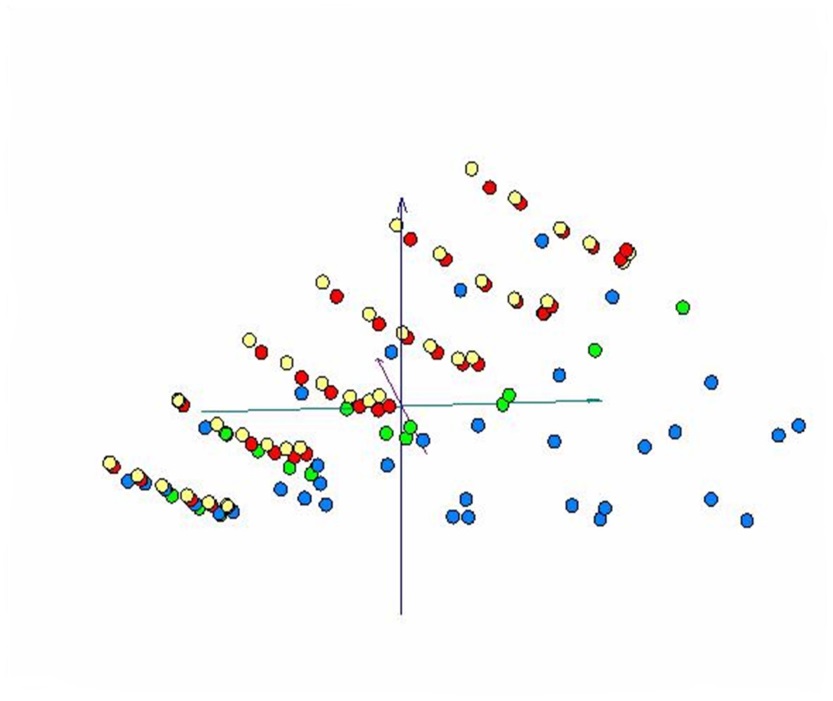
Fig. 3. Errors for different
OpenFOAM solvers in the space of principal components.
The following
example also focuses on the comparative evaluation of the accuracy of openFOAM
solvers. The classical two-dimensional problem of a supersonic inviscid
compressible flow falling on a flat plate at an angle of attack was considered
as a test problem [14]. As a result, an oblique shock wave is formed before the
start of the plate. The simulation results for the solvers considered in
comparison are compared with the known exact solution. Calculations for all
solvers participating in the comparison were carried out with the same setting
of the parameters of the incident flow and angle of attack. Special attention
was paid to QGDFoam solver, which has controlled dissipative properties. For
this solver, within the framework of a general comparison, calculations were
carried out with a variation of the parameter that allows controlling
dissipative properties. The results of estimates of deviations from the exact
solution in various norms for all solvers were obtained. Here, the
implementation of a generalized computational experiment made it possible to
quickly and efficiently obtain a comprehensive picture of the deviation of
numerical solutions from the exact solution. Fig. 4 presents the distribution
of pressure in the vicinity of the shock wave for different solvers in
comparison with exact solution. Also, such distributions are presented for the
QGDF solver when the smoothing parameter is changed.
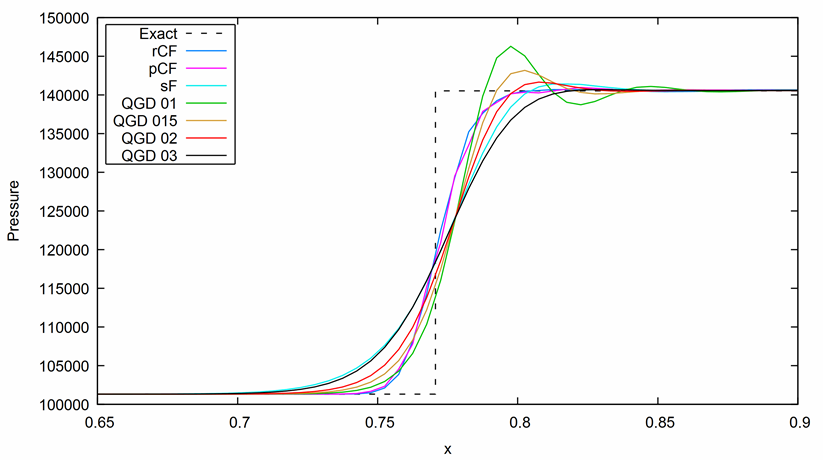
Fig. 4. The distribution of
pressure in the vicinity of the shock wave for different solvers in comparison
with exact solution [14].
The next example
of application of general numerical experiment considers optimization problem.
The example presents a search for optimal shape of three-dimensional blade
assembly intended for power plant [37]. This experiment is based on developed
computational technology for the computation of power loads on the 3D blade
assembly of a power plant in a wind flow. The calculation for various
combinations of the key geometric parameters of the assembly using parallel
computations makes it possible to find the optimal shape of the assembly with
respect to its power characteristics. A virtual experimental facility for
simulating the flow around the power plant based on the solution of the
Navier–Stokes equations was created. Computations aimed at determining the
optimal shape of the blade assembly taking into account constraints on its
design were carried out, and the results were thoroughly analyzed using the
proposed optimization procedure. The solution of the optimization problem is
based on the parameterization of the design using three key parameters. On the
discrete set of values of these parameters, the maximums of two objective
functions—the magnitude of the total aerodynamic force and the magnitude of the
rotation torque—determining the lift-to-drag ratio of the power plant are
found. Figure 5 presents the shape of 3D blade assembly and pressure
distribution on its surface.
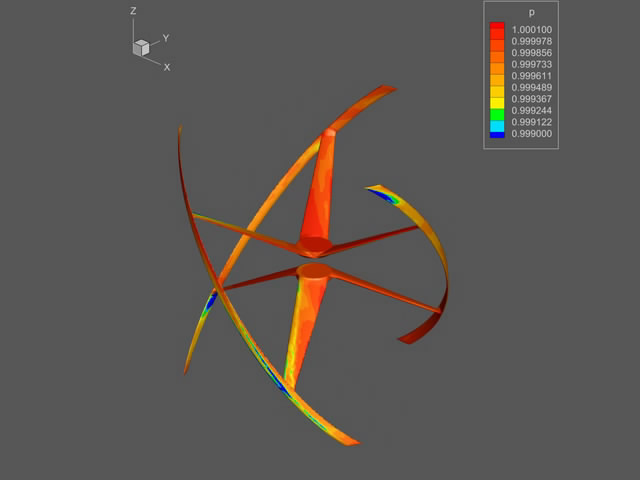
Fig. 5. Pressure distribution on
the surface of 3D blade assembly [37].
The given examples
show the applicability of the presented approach for a wide range of practical
applications; therefore, the construction of a generalized computational experiment
can be considered as a rather universal and useful approach.
The above examples
show the possibility of constructing a generalized computational experiment for
various problems in the field of computational gas dynamics. Parametric studies
can serve as such an experiment, where the basis is the ability to solve the
direct problem of mathematical modeling. An example of an optimization analysis
problem is given, where the generalized computational experiment is based on
solving the inverse problem in an optimization statement. Thus, to create such
an experiment is quite realistic for almost any mathematical modeling problem.
A separate area of
application of a generalized computational experiment can be a comparative
assessment of the accuracy of numerical methods. Similar attempts are presented
in [3, 11, 38] devoted to the problem of accuracy estimation with the help of
the ensemble of solutions. According to [3, 11,38], if a researcher is able to
calculate the same problem using several numerical methods with different
computational properties, in particular, different approximation orders, then
in some cases one can estimate the neighborhood of the approximate solution
containing the exact solution (exact solution enclosure). If an ensemble of
numerical solutions can be divided into clusters of “accurate” and “inaccurate”
solutions, then the error ranking of values can be performed using an a
posteriori analysis of the distances between the numerical solutions. This can
serve as a computational proof of the existence of an exact solution in the
case of nonlinear problems. This approach can be considered as perspective.
Nevertheless, it has evident draw-back. For using of this approach one should have
a set of solvers with different accuracy order.
The concept of
generalized numerical experiment presented in the article has a wide range of
possible applications. For the problems of computational fluid dynamics such an
approach makes it possible to obtain a solution not only for one, separately
taken, problem, but for a whole class of problems defined in a certain range of
the complex of determining parameters. Practical implementation of the approach
becomes possible with the use of parallel calculations in multitask mode. The
results of calculations are multidimensional volumes of data that can be
processed using data analysis tools and visual analytics. The application of
these methods reveals hidden interdependencies between the determining
parameters of the class of problems. Also, these methods allow in many cases to
build the dependence of the valuable functional on the determining parameters,
which makes it possible to further approximate it with geometric primitives and
present it in an analytical form. The examples presented in the article
illustrate generalized computational experiments for various types of tasks,
such as improving the computational properties of difference schemes, finding
the optimal body shape in a stream, a comparative assessment of the accuracy of
algorithms. The approach is a synthesis of parallel computing,
multi-dimensional data processing methods and visual analysis. The application
of this approach makes it possible to increase the efficiency of research for a
number of applied problems of mathematical modeling.
[1]
Bondarev E.N., Dubasov
V.T., Ryzhov Y.A., Svirschevsky S.B. and Semenchikov N.V. 1993 Aerigidromeckanika.
(Moscow: Mashinostroenie) p 608 [In Russian]
[2]
Kozlov L.V.
“Experimental investigation of surface friction on a flat plate in a supersonic
flow in the presence of heat transfer”. 1963 Izvestiya AN SSSR, Mekhanika i
mashinostroenie 2 p11–20 [In Russian]
[3]
Alekseev A.K., Bondarev
A.E., Kuvshinnikov A.E. Verification on the Ensemble of Independent Numerical
Solutions // Lecture Notes in Computer Science, Vol. 11540, pp. 315–324,
2019. DOI: 10.1007/978-3-030-22750-0_25
[4]
Andreev S.V. et al.: A
Computational Technology for Constructing the Optimal Shape of a Power Plant
Blade Assembly Taking into Account Structural Constraints. Programming and Computer
Software, 43(6), 345-352 (2017). DOI: 10.1134/S0361768817060020.
[5]
Bondarev A.E. “Analysis
of Space-Time Flow Structures by Optimization and Visualization Methods” // Transactions
on Computational Science XIX, LNCS 7870, 158-168 (2013).
[6]
Bondarev A.E. and
Galaktionov V.A. “Parametric Optimizing Analysis of Unsteady Structures and
Visualization of Multidimensional Data” // International Journal of
Modeling, Simulation and Scientific Computing, V.04, supp01, (2013) DOI
10.1142/S1793962313410043.
[7]
Bondarev A.E. and
Galaktionov V.A. “Analysis of Space-Time Structures Appearance for
Non-Stationary CFD Problems” // Procedia Computer Science, 51, 1801–1810
(2015).
[8]
Bondarev A.E. “Design
and analysis of multidimensional parametrical solutions for time-dependent CFD
problems” // Mathematica Montisnigri, XXXIII, 58-68 (2015).
[9]
Bondarev A.E. On the
Construction of the Generalized Numerical Experiment in Fluid Dynamics // Mathematica
Montisnigri, Vol. XLII, 2018, p. 52-64.
[10] Bondarev A.E. On visualization problems in a
generalized computational experiment (2019). Scientific Visualization
11.2: 156 - 162, DOI: 10.26583/sv.11.2.12
[11]Bondarev A.E. On the Estimation of the Accuracy of
Numerical Solutions in CFD Problems // Lecture Notes in Computer Science,
Vol. 11540, pp. 325–333, 2019. DOI: 10.1007/978-3-030-22750-0_26
[12]Bondarev, A.E. et al.: Design of program tool BURGERS2
for hybrid finite-difference schemes optimization and visualization. Scientific
Visualization 5(1), 26-37 (2013).
[13]Bondarev A.E., Kuvshinnikov A.E. Analysis of the
Accuracy of OpenFOAM Solvers for the Problem of Supersonic Flow Around a Cone
// Lecture Notes in Computer Science 10862, pp. 221–230, 2018. https://doi.org/10.1007/978-3-319-93713-7_18
[14]Alekseev A.K., Bondarev A.E., Kuvshinnikov A.E.
Comparative analysis of the accuracy of OpenFOAM solvers for the oblique shock
wave problem // Matematica Montisnigri, 2019, vol. XLV, p. 95-105 DOI:
10.20948/mathmontis-2019-45-8
[15]Ivanov A. V., Khilkov S. A. “Aiwlib library as the
instrument for creating numerical modeling applications”, Scientific
Visualization, 10(1), 110 - 127 (2018). DOI: 10.26583/sv.10.1.09
[16]Pacheco P., Programming Parallel with MPI. San
Francisco, CA: Morgan Kaufmann, 1997.
[17]Aleksahin V. F., Bakhtin V. A., Zhukova O. F.,
Kolganov A. S., Krukov V. A., Ostrovskaya I. P., Podderugina N. V., Pritula M.
N., Savitskaya O. A. “Parallelization of NAS parallel benchmarks for Intel Xeon
Phi coprocessor in Fortran-DVMH language”, Vestn. YuUrGU. Ser. Vych. Matem.
Inform., 4:4 (2015), 48–63
[18]Bakhtin V.A., Chetverushkin B.N., Kryukov V.A.,
Shil’nikov E.V., “Extension of the DVM parallel programming model for clusters
with heterogeneous nodes”, Doklady Mathematics, 84 (3), 879-881 (2013).
[19]Bakhtin V. A., Kolganov A. S., Krukov V. A.,
Podderyugina N. V., Pritula M. N. “Mapping DVMH-programs with regular
dependencies onto clusters with GPU”, Vestn. YuUrGU. Ser. Vych. Matem. Inform.,
2:4 (2013), 44–56
[20]Bakhtin V. A., Klinov M. S., Kolganov A. S., Krukov V.
A., Podderyugina N. V., Pritula M. N. “Automatic mapping of Fortran programs
onto clusters with graphics processing units”, Vestn. YuUrGU. Ser. Vych. Matem.
Inform., 3:3 (2014), 86–96
[21]Bakhtin V. A., Zaharov D. A., Kolganov A. S., Krukov
V. A., Podderyugina N. V., Pritula M. N. “Development of parallel applications
using DVM-system”, Vestn. YuUrGU. Ser. Vych. Matem. Inform., 8:1 (2019), 89–106
[22]DVM-system Available at: http://dvm-system.org/
(accessed 25 October 2019)
[23]Keim D., Kohlhammer J., Ellis G. and Mansmann F.
(Eds.) Mastering the Information Age – Solving Problems with Visual
Analytics, Eurographics Association, 2010.
[24]Kielman, J. and Thomas, J. (Guest Eds.) (2009).
Special Issue: Foundations and Frontiers of Visual Analytics / Information
Visualization, Volume 8, Number 4, p. 239-314.
[25]Thomas J. and Cook K. 2005 Illuminating the Path:
Research and Development Agenda for Visual Analytics (IEEE-Press)
[26]Wong P. C., Thomas J. Visual Analytics // IEEE Computer
Graphics and Applications. 2004. V. 24, N. 5. — P. 20-21.
[27]Gorban A, Kegl B, Wunsch D and Zinovyev A 2007
Principal Manifolds for Data Visualisation and Dimension Reduction (Berlin –
Heidelberg – New York: Springer)
[28]Gorban A.N., Zinovyev A. “Principal manifolds and
graphs in practice: from molecular biology to dynamical systems”, International
Journal of Neural Systems, Vol. 20, No. 3 (2010). Pp. 219–232.
[29]Zinovyev A 2000 Vizualization of multidimensional data
(Krasnoyarsk: Krasnoyarsk Univ.)
[30]Bondarev A. E. and Bondarev E. N. Visualization
Functions in Computational Fluid Dynamics / Obshcheros. NauchnoTekhn. Zh.
Polet (Mashinostr, Moscow, 2000), No. 10, pp. 53–60 [in Russian].
[31]Bondarev A.E.,
Galaktionov V.A., Chechetkin V. M. Analysis of the Development Concepts and
Methods of Visual Data Representation in Computational Physics / Computational
Mathematics and Mathematical Physics, 2011, Vol. 51, No. 4, pp. 624–636.
[32]ParaView system Available at: https://www.paraview.org/
(accessed 25 October 2019)
[33]VizIt Available at:
https://sourceforge.net/projects/visit/ (accessed 25 October 2019)
[34]TecPlot Available at: https://www.tecplot.com/
(accessed 25 October 2019)
[35]Bondarev A.E., Galaktionov V.A. Multidimensional data
analysis and visualization for time-dependent CFD problems / Programming and
Computer Software. 2015. Vol. 41. №. 5. P. 247–252. DOI:
10.1134/S0361768815050023
[36]Bondarev A.E., Bondarenko A.V., Galaktionov V.A. (2018) Visual analysis procedures for
multidimensional data. Scientific Visualization 10.4: 109 - 122, DOI:
10.26583/sv.10.4.09
[37]Andreev S.V. et al.: A Computational Technology for
Constructing the Optimal Shape of a Power Plant Blade Assembly Taking into
Account Structural Constraints. Programming and Computer Software, 43(6),
345-352 (2017). DOI: 10.1134/S0361768817060020.
[38]Alekseev A.K., Bondarev A.E. Estimation of the
Distance between True and Numerical Solutions. Computational mathematics and
mathematical physics, 2019, Т. 59, № 6, с. 857-863 DOI:
10.1134/S0965542519060034
