ИССЛЕДОВАНИЕ ТЕПЛОГИДРОФИЗИЧЕСКИХ ПРОЦЕССОВ НА КРУПНОМАСШТАБНЫХ МОДЕЛЯХ ЯЭУ С ИСПОЛЬЗОВАНИЕМ PIV-МЕТОДОВ (СХЕМА, ОСОБЕННОСТИ)
Д.А. Сергеев, А.А. Кандауров, Ю.И. Троицкая
Институт прикладной физики РАН, Россия
E-mail: daniil@hydro.appl.sci-nnov.ru
Содержание
2. Общее описание модели перспективного реактора БН
3. Аппаратная часть PIV-измерительной системы. Система подсветки и съемки
4. Предварительная обработка изображений и нахождение полей скорости
6. Оценка точности измерений и влияния на них флуктуаций температуры
Аннотация
В работе обсуждаются особенности применения PIV-методов при исследовании теплогидравлических процессов в крупномасштабных моделях ядерных энергетических установках (ЯЭУ) и, в частности, результаты, полученные на стенде ТИСЕЙ, крупномасштабной модели перспективного реактора на быстрых нейтронах (БН). Описаны методики одновременного использования нескольких лазеров для подсветки и видеокамер для съемки, методики обработки изображений, калибровки и точности выполненных измерений.
Ключевые слова: поля скорости, PIV, РЕАКТОР на быстрых нейтронах
1. Введение
В инженерной практике для исследования теплогидравлических процессов в ЯЭУ часто используются модели различного масштаба и сложности. При этом можно разделить проводимые исследования на три основных типа: 1) первый, наиболее простой, — это моделирование отдельных, зачастую небольших узлов, например, обтекание модельных препятствий, течения в трубопроводах и т.д. (примеры см. [1, 2]) 2) второй - моделирование теплогидравлики отдельных элементов ЯЭУ, например, исследование процессов в ТВЭЛ (примеры см. [3, 4]) 3) третий, и наиболее сложный - создание комплексных крупномасштабных моделей ЯЭУ (примеры см. [5, 6]). Основная цель, преследуемая во всех исследованиях на моделях - попытаться максимально близко смоделировать реальную ситуацию, изучить ее в контролируемых условиях и, при необходимости, верифицировать расчетные CFD коды, которые всё чаще используются в последнее время для моделирования. Наиболее полная и представительная верификация CFD-кодов может быть выполнена с использованием экспериментальных данных о полях скорости течений. Для их измерений в настоящее время наиболее современным является метод Particle Image Velocimetry (PIV). При проведении лабораторных экспериментов первого и второго типа обычно используют стандартные, производимые серийно образцы, измерительных PIV-систем с минимальным количеством доработок. Однако в экспериментах на крупномасштабных моделях возникает ряд проблем, связанных, например, со сложной конфигурацией и большими объемами исследуемых модельных объектов; широким диапазоном изменения параметров теплогидравлических процессов с сильными флуктуациями температуры, приводящими к оптическим искажениям; необходимостью совмещения визуализации и контактных измерений и т.д. В настоящей работе описывается опыт адаптации и модификации PIV-методов для проведения подобных исследований на примере крупномасштабного стенда ТИСЕЙ, являющегося моделью перспективного реактора БН, разрабатываемого в АО «ОКБМ Африкантов».
2. Общее описание модели перспективного реактора БН
В состав стенда ТИСЕЙ входят крупномасштабная модель реактора и петля системы аварийного отвода тепла (САОТ). Внешние контуры и высотные отметки оборудования стенда и реактора геометрически подобны, масштаб моделирования принят равным 1:5. В качестве теплоносителя в отличие от штатной установки, где используется жидкий натрий, на стенде применяется вода. Мощность модели активной зоны в номинальном режиме - не более 350 кВт. Для использования методов основанных на визуализации, в воду добавляются микрочастицы полиамида, плотность 1.03 г/см3, диаметр 20 мкм.
Модель реактора представляет собой сектор с углом раствора 80o. Она включает в себя все основные компоненты перспективного реактора БН (см. Рис. 1). Более подробное описание стенда приведено в [6]. Внутренняя камера модели сектора бака реактора имеет весьма сложную конфигурацию. Кроме того, внутри ее дополнительно установлены термозонды (не показаны на Рис. 1), представляющие собой вертикальные стержни диаметром около 7 мм, на которых закреплены температурные датчики. Была поставлена задача получения поля скорости в максимально большей области объема внутри бака, используя одновременно для измерений и верхнее и нижнее окно.
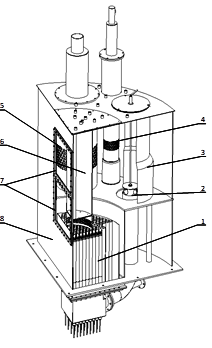
Рис. 1. Модель перспективного реактора БН: 1– модель активной зоны с нагревательными элементами; 2 – клапан с ручным приводом; 3 –вытеснитель главного циркуляционного насоса первого контура (ГЦН-1),показана часть вытеснителя; 4 – модель автономного теплообменника САОТ (АТО); 5 – модель промежуточного теплообменника (ПТО); 6 – вытеснитель центральной поворотной колонны (ЦПК); 7 – прозрачные окна; 8 – корпус.
3. Аппаратная часть PIV-измерительной системы. Система подсветки и съемки
Измерения необходимо было выполнить в сечениях на АТО и ПТО. С учетом особенностей конструкции модели реактора была выбрана схема подсветки и видеосъемки с одновременным использованием двух компактных непрерывных лазеров с диодной накачкой и двух видеокамер.
Интересующие сечения на АТО и ПТО выбирались с учетом конструктивных особенностей стенда и термозондов, используемых штатно для измерений распределения температуры. Положение видеокамер выбиралось, исходя из необходимости, максимально увеличить размеры поля видимости. Общая схема расположения видеокамер и лазеров представлена с разных ракурсов на Рис. 2 а, б. На Рис. 2 в, г, насколько это, возможно, показаны положения областей видимости с видеокамер внутри на трехмерной модели стенда. Сравнивая Рис. 2 в и г можно заметить, что область видимости нижней видеокамеры частично пересекается с областью видимости верхней видеокамеры. Это сделано, для возможности дальнейшей сшивки получаемых полей скорости в единое.
Использование в системе двух камер, связанных с одним компьютером, не позволило проводить запись синхронно, поэтому запись и сохранение происходит поочередно. Во время первой фазы происходит непосредственная регистрация видеоизображений движения частиц: сначала верхней, затем нижней камерой (по 50 кадров в течении 1 секунды). В ходе предварительных экспериментов было продемонстрировано, что использование частоты кадров ниже максимального значения 50 кадров/секунду, приводит к невозможности корректно вычислить смещение частиц из-за их ухода из лазерного ножа. Причиной тому является как высокое значение компоненты скорости, нормальной лазерной плоскости, так и температурные искажения, которые могут приводить к локальному смещению лазерной плоскости. Поэтому была выбрана максимальная частота при сохранении базового разрешения для всех режимов.
4. Предварительная обработка изображений и нахождение полей скорости
Для вычисления поля скорости по полученным цифровым изображениям использовалась стандартная для PIV-метода обработка цифровых изображений (см. [7]). Изображения разбивались прямоугольной сеткой на фрагменты (или окна сравнения) размером 64×64 пикселей. Далее для интенсивности изображений двух фрагментов имеющих одинаковое положение на паре соседних кадров вычислялась кросскорреляционная функция (далее сокращенно ККФ). Положение ее максимума соответствует смещению изображения в среднем в области этого фрагмента между кадрами, и, разделив его на промежуток времени между ними, можно получить скорость, использовалось подпиксельное уточнение положения максимума ККФ по трем точкам наиболее близко находящихся к пику с помощью Гауссовой двумерной функции.
Для уменьшения влияния статических шумов (изменяющихся между кадрами особенностей фонового изображения) на результаты вычисления ККФ применялось вычитание фонового изображения. Присутствие таких шумов, проявляется на ККФ в виде пика в центре (координаты по x и y 0, 0), соответствующего отсутствию смещения. Однако, высокая частота съемки приводила к тому, что координаты пика ККФ, соответствующего полезному сигналу, также были вблизи нуля. Для компенсации этого эффекта перед вычислением ККФ проводилось вычитание фона.
|
(а) |
(б) |
|
(в) |
(г) |

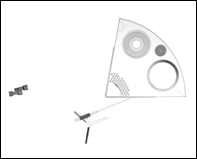
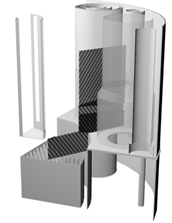
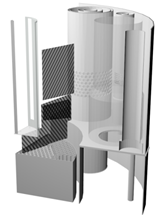
Рис. 2. Схема расположения видеокамер и лазеров (а) изометрическая проекция (б) вид сверху (б) вид сбоку (показано для сечения на АТО). (в) и (г) положение областей видимости камер внутри бака (на ПТО и на АТО соответственно). Различной штриховкой показаны области видимости для верхней и нижней камер.
Фоновая освещенность за время записи (до нескольких часов) может изменяться: включается и выключается свет в соседних со стендом помещениях, меняется положение бликов и т.п. Поэтому использование фиксированного изображения для вычитания фона может оказаться неэффективным. Кроме того, фоновые изображения, получаемые при закрытом объективе, или при выключенном лазере не учитывают фоновой засветки, создаваемой лазером. По этим причинам при подготовке изображений к кросскорреляционному анализу использовалось динамическое вычитание фона. Фоновое изображение для вычитания вычисляется для каждого кадра отдельно на основе нескольких соседних кадров (т.н. скользящее окно). Размер окна равен 11 - т.е. для вычисления берется исходный кадр, 5 предыдущих и 5 последующих. Интенсивность фонового изображения в каждой точке имеет значение, соответствующее минимуму значений в этой точке для всего набора кадров из окна. Таким образом, достигается удаление с изображения всех смещающихся за время вычисления ярких объектов: для присутствующей концентрации частиц хотя бы на одном из кадров на данном пикселе будет отсутствовать изображение частицы и пиксель примет значение фонового изображения.
Далее при вычислении ККФ, для каждого эксперимента (записи) вначале генерируется равномерная прямоугольная сетка с шагом 32 пикселя (перекрытие 50% для окна сравнения размером 64×64 пикселя). Однако на изображениях присутствуют области, в которых изображения частиц перекрыты элементами конструкции, включая термозонды - конфигурация изображений сложная. Поэтому в узлах сетки попадающих в эти области вычисления производить не нужно - в них все равно получатся ошибочные значения смещения (скорости). Во избежание лишних расчетов при генерации сетки был специально разработан метод использования маски.
Маска - это файл, полученный из исходного изображения бинаризацией: нулевые значения соответствуют замаскированным областям, которые необходимо исключить из вычислений (на них не видно частиц); не нулевые значения соответствуют областям, в которых видны частицы, и где может проводится вычисления их смещения.
В различных записях угол поворота видеокамеры мог меняться, изменялся уровень воды, добавлялись дополнительные элементы внутри камеры (обтекатели ЦПК), изменялась конфигурация резинового покрытия поглощения лазерного излучения и изгибались термозонды. Все это привело к необходимости создания набора масок, подходящих для каждого режима. Примеры таких масок приведены на Рис. 3.
|
(а) |
(б) |

Рис. 3. Примеры масок (а) для изображения с верхней видеокамеры (б) для изображения с нижней видеокамеры. Штриховкой обозначены области, не закрытые маской, т.е. пригодные для вычисления смещения частиц.
Для каждой маски, перед генерацией сетки фрагментов для вычисления ККФ, на изображении находится прямоугольник, включающий в себя все незамаскированные точки. В дальнейшем фрагменты для вычисления ККФ выбираются только в пределах этого прямоугольника. При этом, ККФ находится только для фрагментов состоящих хотя бы наполовину из незамаскированных точек.
Для вычисления поля скорости было использовано максимально возможное число кадров. Для сравнения выбирались последовательные кадры. При этом каждый кадр сравнивался с последующим. Таким образом, для подзаписи, состоящей из 50 кадров, было вычислено 49 полей скорости, и такие вычисления проводились для всех подзаписей в записи.
В результате описанной выше обработки были получены поля скорости для каждого (кроме последнего в подзаписи) изображения. Однако, несмотря на борьбу со статическими шумами путем вычитания фона, и использование точных масок, далеко не для каждого фрагмента удается корректно измерить смещение частиц.
Финальный этап фильтрации проводился по отличию от среднего по времени подзаписизначения. Однако, для динамических режимов такая фильтрация недопустима, так как истинное значение скорости в точках может значительно изменяться. Поэтому была разработана методика двухпроходной медианной фильтрации по подзаписям. Обработка проводится для каждой подзаписи для каждого значения смещения. На первом проходе определяется значение медианного среднего. Затем в подзаписи отбрасываются все значения смещений, отличие которых от среднего превышается пороговое значение, которое было выбрано 5 пикселей/кадр. Второй этап аналогичен первому, но среднее вычисляется по уже отфильтрованным значениям и оказывается ближе к истинному значению скорости. Интервал фильтрации при втором подходе выбирается более узким - 2 пикселя/кадр.
После проведения всех стадий обработки получались мгновенные поля скорости (в пикселях/секунду) для сравнения соседних кадров. На них было много пропущенных значений (из-за ошибок), поэтому в качестве основных рабочих полей использовались поля полученные осреднением по временным интервалам подзаписи: около 1 секунды. Следует отметить, что из-за последовательной записи с двух камер полученные подобным образом поля скорости сдвинуты друг от друга во времени на 1 секунду. Однако характерные оценки времени изменчивости течений, включая нестационарные режимы, демонстрируют, что они значительно превосходят 1 секунду. Поэтому измерения обеими камерами можно считать практически одновременными и полученные ими поля скорости в дальнейшем сшивались в единое.
5. Определение области видимости видеокамер и описание преобразования координат и полей скорости в реальные значения в плоскости лазерного сечения
Реальные размеры и координаты получаемых изображений в системе отсчета связанной с лазерным сечением в модели реактора являются неизвестными. Также следует отметить, что в ходе обработки PIV-методами все вычисления производятся в координатах полученного изображения и размеры выражаются в пикселях. Поэтому, получаемые в результате работы этих алгоритмов смещения (скорости) течения выражаются в пикселях (пикселях/кадр). Для пересчета получаемых координат узлов сетки поля скорости (координат центров фрагментов) и самих значений скоростей в систему координат модели обычно используется один (или два в случае анизотропии сенсора видеокамеры) масштабных коэффициента. Однако особенности конфигурации съемки (под углом см. Рис. 2) не позволяют ввести такой коэффициент: масштаб изображения в разных его частях сильно различается. Для корректного пересчета требуется нахождение преобразования координат между координатной системой изображений и координатной системой лазерного сечения - вычисление специальной проекционной матрицы.
Наиболее простым решением для ее нахождения является установка реальных физических мишеней с известными размерами и координатами в системе отсчета модели и лазерного сечения, внутри бака реактора, получение их изображений и нахождение преобразования координат. При этом, мишени должны быть использованы в рабочей конфигурации, т.е. расположены в стенде, заполненным водой (для правильного учета рефракции) и в лазерной плоскости, так как именно в ней во время съемки расположены частицы, освещенные лазером и регистрируемые видеокамерой.
Для минимизации вносимых изменений модели, были использованы вертикальные мишени, вносимые в модель через специально сделанные отверстия в верхней крышке. В качестве мишеней использовались отвесы: свинцовые грузы весом до 5 г, установленные с шагом 50 мм на плетеной леске диаметром 0.1 мм. Проведенные вне модели испытания показали, что леска под весом грузов растягивается незначительно, при этом грузы под действием силы тяжести располагаются строго вертикально.
Была проведена специальная серия съемок изображений отвесов для различных отверстий для обеих видеокамер. В этой серии частицы в воду не добавлялись, вода была разогрета до 50 °С для того, чтобы ее оптическая плотность была близкой к оптической плотности воды в основной серии экспериментов. Пример изображения отвесов показан на Рис. 4 а.
Отвесы на изображениях были вручную отмечены маркерами. Координаты отвесов в системе координат модели вычисляются исходя из известного шага между грузами, известного положения отверстий, а также известной вертикальной координаты для груза, расположенного на уровне поверхности. Таким образом, для каждой видеокамеры в обоих сечениях на ПТО и АТО были получены наборы точек, для которых известны координаты на изображении и координаты на реальной модели в плоскости лазерного ножа.
Однако внесение реальных калибровочных элементов в модель была вынужденной процедурой. При этом при изменении положений лазерного ножа пришлось бы делать новые отверстия для новой калибровки. Поэтому был разработан методвиртуального3D-моделирования мишеней и их изображений.
Для расчета используется программная среда свободного доступа Blender (Рис. 4 б), позволяющая синтезировать изображения с виртуальных видеокамер с учетом множества факторов, в том числе рефракции света. Положение видеокамер в 3D-модели выбиралось близким к измеренному, и дополнительно была разработана система их автоматической подстройки, на основе достижения совпадения изображений неподвижных элементов модели, на искусственных и реальных изображениях. (Рис. 4 в).
Для определения, каким образом координаты изображения преобразуются в реальные координаты, использовались калибровочные сетки, располагаемые на 3D-модели на месте лазерной плоскости (Рис. 4 б, г). Вручную вычислялись угловые точки областей видимости на сетке. Затем с учетом известного положения сетки вычислялись координаты этих точек в системе координат модели. Таким образом, были получены несколько точек, для которых известны координаты на изображении и координаты на реальной модели в сечении лазерного ножа, и на их основе матрица преобразования. Отличие при использовании этого преобразования от результата преобразования на основе физических мишеней (отвесов) составило в среднем 0.2 %, что говорит о высокой точности нового метода.
|
(а) |
(б) |
(в) |
(г) |

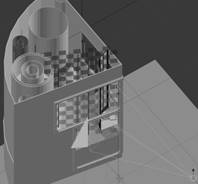


Рис. 4. (а) Использованная для расчетов 3D модель с вставленной сеткой в область лазерного ножа в программе Blender. (б) совмещение изображения, полученного с верхней видеокамеры в реальной ситуации с расчетным (в) пример рендеринга изображения с верхней видеокамеры, сетка расположена на месте лазерной плоскости, направленной на ПТО.
На Рис. 5 представлены примеры полученных полей скорости в координатах модели реактора в сечениях лазерного ножа на АТО и ПТО в одном из режимов.
6. Оценка точности измерений и влияния на них флуктуаций температуры
Исходя из того, что в исследованиях используется нестандартная PIV-система в специфических условиях, необходимо обсудить вопросы, связанные с точностью проводимых измерений. Для оценки точности были использованы результаты работы [8], где детально исследовались вопросы, связанные с ошибками при проведении PIV-измерений. В частности изучалась зависимость среднеквадратичной ошибки измерения смещения изображения от размера фрагмента, среднего количества частиц на изображении фрагмента, амплитуды измеряемого смещения, размера изображения частиц и т.д. В наших PIV измерениях основные характеристики были следующими: размер фрагмента 64×64 пикс (фиксировано); среднее количество частиц в окне 25; среднее измеряемое смещение 1.2 пикселя; средний размер (диаметр) частицы не превышал 4.4 пикселя для всех исследуемых режимов, включая режимы с нагревом, где наблюдались интенсивные температурные флуктуации (при отсутствии нагрева размер частиц составлял в среднем 2.3 пикселя).
Используя данные исследования [8], можно утверждать, что для выбранной схемы PIV-обработки, в настоящей работе среднеквадратичная ошибка при определении скорости составила: 1.8 и 0.27 мм/с соответственно для мгновенного измерения и осредненного по подзаписи. Изменения температуры жидкости во времени и в пространстве в разных режимах работы стенда приводят к искажениям получаемых изображений, зачастую – размывания изображения. О размытии изображений уже упоминалось выше, и если говорить об эффекте среднего увеличения изображения частиц за счет подобного размытия, то соответствующее увеличение погрешности уже учтено, когда мы приняли в расчетах среднеквадратичной погрешности диаметр частиц 4.4 пикселя. Однако, остается эффект изменения размеров и смещений изображений частиц не в среднем, а между двумя последовательными кадрами, за счет флуктуаций и его влияния на определение смещения. На основе анализа неподвижных изображений термозондов присутствующих на кадрах (см. Рис. 6), было получено, что за промежуток между кадрами 0.02 секунды изменение размера в среднем составляет всего 0.05 пикселя. С учетом, того, что вклад изображений всех частиц, находящихся в окне корреляции, учитывается путем интегрирования при поиске ККФ, можно утверждать, что ошибка при определении скорости не превысит 0.27 мм/с. Таким образом, влиянием этого эффекта можно пренебречь.
|
(а) |
(б) |
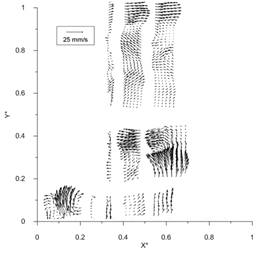
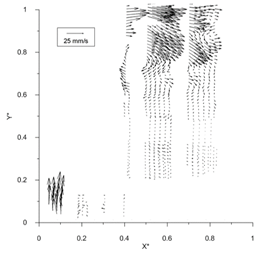
Рис. 5. Примеры полей скорости для одного из режимов, полученных усреднение по подзаписи а) для сечения на АТО б) для сечения на ПТО. Координаты безразмерные X*=X(мм)/1200, Y*=Y(мм)/1200
|
(а) |
(б) |
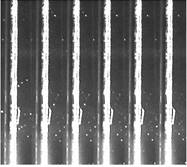
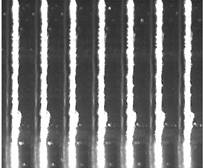
Рис. 6. Последовательные во времени изображения частиц вместе термозондом (а) в отсутствии температурных флуктуаций (б) в присутствии температурных флуктуаций.
7. Заключение
Разработана и создана специальная PIV- система, предназначенная для исследования теплогидравлических процессов в крупномасштабной модели перспективного реактора БН. Система позволяет проводить PIV-измерения на максимальных (среди известных авторам PIV-измерений) пространственных масштабах в условиях сложной конфигурации модели реактора, отражений и искажений сечения лазерного ножа, затемнения, в условиях замкнутого объема. Применение методов фильтрации и использование масок изображений позволило на порядок уменьшить количество некорректных измерений вектора скорости течения в поле лазерной подсветки. Разработана методика пересчета координат изображения и поля скорости в систему отсчета модели реактора с помощью виртуального 3D моделирования мишеней без потери в точности по сравнению с методом внесения физических объектов-мишеней в снимаемую область. Комплексный подход обеспечил точность измерений на уровне стандартов для PIV-систем.
Благодарности
Работа была частично поддержана грантом РФФИ № 15-48-02382 р_поволжье.
Список литературы
- Yamano, H., Tanaka, M., Murakami, T., Iwamoto, Y., Yuki, K., Sago, H., and Hayakawa, S., J. Nucl. Sci. Technol., 2011, vol. 48, no. 4, p. 677. doi 10.1080/18811248.2011.9711749.
- Bol’shukhin, M.A., Sveshnikov, D.N., Fomichev, V.I., and Znamenskaya, I.A., Optoelectron., Instrum., Data Process., 2014, vol. 50, no. 5, p. 490. doi 10.3103/S8756699014050070.
- Tar. D., Baranyai. G., Ezsol. Gy., Toth I., Proc. 8th International Symposium On Particle Image Velocimetry. Melbourne: University of Melbourne press, 2009. P. 78.
- Dmitriev, S.M., Khrobostov, A.E., Varentsov, A.V., Dobrov, A.A., Doronkov, D.V., Sorokin, V.D., and Samoilov, O.B., Therm. Eng., 2014, vol. 61, no. 8, p. 558. doi 10.1134/S0040601514080059
- Pakholkov, V.V., Kandaurov, A.A., Potseluev, A.I., Sergeev D.A,. Shepelev Troitskaya Yu.I., Therm. Eng. 2017, vol .64, no. 7, P. 496, doi:10.1134/S0040601517070059,
- Rust K., Weinberg D., Hoffmann H., Frey H.H. Summary report of NEPTUN investigations into the steady state thermal hydraulics of the passive decay heat removal. FZKA-5665. Forschungszentrum Karlsruhe, 1995. P. 56.
- Sergeev, D.A., Instrum. Exp. Tech., 2009, vol. 52, no. 3, p. 438. doi 10.1134/S0020441209030257
- Bolinder J. On the accuracy of digital particle image velocimetry system. Tech.rep. Lund: Inst. Of Tech. Div. of Fluid Mech. 1999. P. 25. ISSN 0282 – 1990. http://www.lavision.de/en/downloads/publications/particle-imaging.php
INVESTIGATION OF THE THERMAL-DYNAMIC PROCESSES ON A LARGE SCALE BENCHMARKS OF THE NUCLEAR POWER PLANTS WITH PIV METHODS (SCHEME, FEATURES)
D.A. Sergeev, A.A. Kandaurov, Yu.I. Troitskaya
Institute of applied physics RAS, Russian Federation
E-mail: daniil@hydro.appl.sci-nnov.ru
Abstract
The peculiarities of the application of PIV-methods in the study of thermohydraulic processes in large-scale models of nuclear power plants, in particular, the results obtained at the TISEY facility, a large-scale model of a prospective sodium fast reactor, are discussed. Methods of simultaneous use of several lasers for illumination and video cameras for shooting, methods of image processing, calibration and accuracy of measurements are described.
Keywords: velocity fields, piv, fast reactor
References
- Yamano, H., Tanaka, M., Murakami, T., Iwamoto, Y., Yuki, K., Sago, H., and Hayakawa, S., J. Nucl. Sci. Technol., 2011, vol. 48, no. 4, p. 677. doi 10.1080/18811248.2011.9711749.
- Bol’shukhin, M.A., Sveshnikov, D.N., Fomichev, V.I., and Znamenskaya, I.A., Optoelectron., Instrum., Data Process., 2014, vol. 50, no. 5, p. 490. doi 10.3103/S8756699014050070.
- Tar. D., Baranyai. G., Ezsol. Gy., Toth I., Proc. 8th International Symposium On Particle Image Velocimetry. Melbourne: University of Melbourne press, 2009. P. 78.
- Dmitriev, S.M., Khrobostov, A.E., Varentsov, A.V., Dobrov, A.A., Doronkov, D.V., Sorokin, V.D., and Samoilov, O.B., Therm. Eng., 2014, vol. 61, no. 8, p. 558. doi 10.1134/S0040601514080059
- Pakholkov, V.V., Kandaurov, A.A., Potseluev, A.I., Sergeev D.A,. Shepelev Troitskaya Yu.I., Therm. Eng. 2017, vol .64, no. 7, P. 496, doi:10.1134/S0040601517070059,
- Rust K., Weinberg D., Hoffmann H., Frey H.H. Summary report of NEPTUN investigations into the steady state thermal hydraulics of the passive decay heat removal. FZKA-5665. Forschungszentrum Karlsruhe, 1995. P. 56.
- Sergeev, D.A., Instrum. Exp. Tech., 2009, vol. 52, no. 3, p. 438. doi 10.1134/S0020441209030257
- Bolinder J. On the accuracy of digital particle image velocimetry system. Tech.rep. Lund: Inst. Of Tech. Div. of Fluid Mech. 1999. P. 25. ISSN 0282 – 1990. http://www.lavision.de/en/downloads/publications/particle-imaging.php