Визуализация сейсмических данных на
виртуальном глобусе
А. Бобков1, А. Леонов2, В.
Чебров3
1 Московский физико-технический институт, Москва,
Россия
2 Институт истории естествознания и техники им. С.И. Вавилова
РАН, Москва, Россия
3 Камчатский филиал Геофизической службы РАН, Петропавловск-Камчатский, Россия
alexander.e.bobkov@gmail.com, a.leonov@ihst.ru, chebr@emsd.ru
Оглавоение
2. МЕТОДЫ
ВИЗУАЛИЗАЦИИ И ПРИМЕРЫ ДАННЫХ
2.1. Построение виртуального
глобуса
2.3. Режимы отображения
глобуса
2.6. Сейсмическая
регионализация
2.8. Геологические модели и
анимация извержений
Аннотация
В настоящее время в геофизике активно развиваются методы трехмерного моделирования глубинных структур, визуального анализа данных, прежде всего, полученных на основе сетей инструментальных наблюдений. Однако в сфере представления данных по-прежнему используются в основном консервативные методы: плоские карты поверхности и сечения Земли. В то же время становится популярным направление виртуальных глобусов, связанное с развитием аппаратного (видеокарты) и программного обеспечения (NASA World Wind и osgEarth).
В статье рассматривается трехмерная визуализация сейсмических данных на основе полупрозрачного виртуального глобуса: каталоги землетрясений, зоны субдукции, сейсмические регионы, данные сейсмотомографии и др. Предложен метод рендеринга и фильтрации массивов точечных данных (каталогов землетрясений) на GPU, методы рендеринга объемных данных (сейсмотомографии) с учетом кривизны поверхности Земли, методы корректного рендеринга полупрозрачного рельефа согласованно с другими объектами, методы визуализации и анимации различных подземных процессов.
Разработано приложение для согласованной 3D-визуализации сейсмических данных в едином контексте с возможностью гибкой настройки режимов отображения. Приложение поддерживает отображение на различных стереоскопических устройствах. Стерео-режим позволяет визуально отделить группы гипоцентров между собой, а также визуально отделить подземные объекты от объектов, расположенных на поверхности Земли.
Keywords: виртуальный глобус, виртуальное окружение, геофизика,
землетрясения, сейсмотомография.
В настоящее время в
геофизике активно развиваются методы трехмерного моделирования глубинных
структур, визуального анализа данных, прежде всего, полученных на основе сетей
инструментальных наблюдений [1][2]. Растет число сейсмостанций, существенно
возрастает объем регистрируемых данных. Это связано как с развитием техники
регистрации, так и с увеличением мощности программно-аппаратных средств
обработки данных. Однако в сфере представления данных по-прежнему используются
в основном консервативные методы: плоские карты поверхности и сечения Земли.
В то же время, в последние
годы значительное развитие получило направление виртуальных глобусов, которые
могут использоваться для трехмерной визуализации геопространственных
данных. В 2000 году была начата работа над виртуальным глобусом Keyhole, который в 2005 году был выпущен в свободном
доступе как Google Earth и
стал де-факто первым всемирно известным виртуальным глобусом [3]. Позже
появился целый ряд аналогичных продуктов.
Развитие виртуальных
глобусов связано с тремя основными причинами:
· Появлением данных
дистанционного зондирования Земли (ДЗЗ) высокого разрешения (спутниковых
снимков, цифровых моделей рельефа), в том числе, свободно доступных в
интернете;
· Распространением
скоростного доступа к интернету, что дало возможность в реальном времени
передавать с удаленных серверов на локальный компьютер данные ДЗЗ, объемы
которых измеряются терабайтами;
· Развитием
технических и алгоритмических средств компьютерной визуализации динамических
данных, что позволяет интерактивно отображать на экране модель глобуса с
текстурами и рельефом высокого разрешения и различными эффектами с наложением геоданных и возможностью демонстрации их
пространственно-временной структуры.
Растет интерес к новым
подходам в визуализации геоданных. Так в 2008 году
вышла монография, посвященная вопросам визуализации в географии: Geographic Visualization: Concepts, Tools and Applications [4]. В
ней рассматриваются современные тренды в визуализации геопространственных
данных, значение Google Earth
для географии, польза 3D и стерео-3D технологий, использование многоэкранных проекционных установок для визуального
анализа данных. В статье [5] рассматривается применение виртаульных глобусов в геологии. В журнале Computers & Geosciences вышел
целый номер полностью посвященный виртуальным глобусам
[6].
В 2011 году вышла первая
монография, полностью посвященная разработке виртуальных глобусов: 3D Engine Design for
Virtual Globes [7].
В ней рассматриваются математические основы глобуса, визуализация векторных
данных на поверхности глобуса, визуализация самого глобуса на основе
спутниковых снимков и цифровых моделей рельефа, рассматриваются проблемы при
визуализации глобусов и способы их решения.
Самое популярное приложение
из разряда виртуальных глобусов, Google Earth, не предназначено для просмотра данных под
поверхностью Земли, и не поддерживает стереоскопический режим отображения.
Также эти функции не поддерживаются большинством современных виртуальных
глобусов. Усилия разработчиков в этой области сейчас направлены главным образом
на усовершенствование визуализации данных на поверхности Земли, повышение
реалистичности, развитие эффектов атмосферы, воды, растительности и т. п.
Некоторые специализированные
приложения поддерживают показ проекций подземных данных на поверхность Земли
(например, эпицентры землетрясений). Есть специальное приложение для
визуализации землетрясений на глобусе — Earthquake3D [8]. Оно поддерживает автоматическую
подгрузку оперативного каталога землетрясений с сайта
USGS. Но оно тоже показывает землетрясения на поверхности глобуса. Для объемного рендеринга данных (в
частности подземных данных) существует множество различных приложений, но все
они работают без привязки к глобусу.
Трехмерная визуализация
данных под поверхностью Земли на виртуальных глобусах, тем более в стерео-режиме, незаслуженно
обойдена вниманием. Авторам известно только одно приложение для работы с
подземными данными на виртуальном глобусе - GA World Wind Suite [9],
разработанное в Австралии на основе NASA World Wind Java SDK.
В статье описано применение
виртуального глобуса для показа сейсмических данных под поверхностью Земли.
Предложен метод рендеринга и фильтрации массивов
точечных данных на GPU, методы рендеринга объемных
данных с учетом кривизны Земли, методы корректного рендеринга
полупрозрачного рельефа согласованно с другими объектами, методы визуализации и
анимации различных подземных процессов. Разработано приложение для
3D-визуализации сейсмических данных с возможностью гибкой настройки режимов
отображения глобуса. Поддержано отображение в различных
стерео-режимах (горизонтальная стереопара, квадробуфер).
Приложение может
использоваться для демонстрации массивов сейсмических данных, их визуального
анализа, в том числе комплексного анализа различных наборов данных в едином
контексте.
2. МЕТОДЫ ВИЗУАЛИЗАЦИИ И ПРИМЕРЫ ДАННЫХ
2.1. Построение виртуального глобуса
Существуют данные
дистанционного зондирования Земли свободно доступные в интернете. Сюда можно
отнести спутниковые снимки Landsat-7 с разрешением 15м в нескольких
спектральных диапазонах, цифровую модель рельефа SRTM 90м и очищенную
и обработанную текстуру Земли Blue Marble Next Generation
с разрешением 500м.
Разрабатывается открытое
программное обеспечение для построения глобуса по данным ДЗЗ. В 2008 году
началась разработка библиотеки osgEarth на языке C++
на базе популярного графического инструментария OpenSceneGraph,
которая активно развивается до сих пор. На основе этих инструментов возможна
разработка своего глобуса для специализированных задач. В нашем проекте
использовалась именно библиотека osgEarth.
Существует множество методов
рендеринга рельефа, но в случае глобуса рекомендуется
использовать метод CLOD (Chunked LOD). Он описан в
книге [7] и реализован в osgEarth. Этот метод не требует предобработки сырых геопривязанных изображений, удобно ложится на эллипсоид,
обеспечивает приемлемую точность в рамках типа float,
и работает даже на старом аппаратном обеспечении начала 2000х годов. Метод
заключается в использовании квадродерева из тайлов, выстроенных вдоль меридианов и параллелей. Тайл — элемент поверхнсти,
который имеет свою геометрию и текстуру и относится к некоторому уровню
детализации. При приближении к тайлу он заменяется на
4 тайла большей детализации. На стыках между тайлами разных уровней детализаций могут возникать щели.
Это решается добавлением по периметру каждого тайла
вертикальной полоски треугольников, которая называется ”юбка”. При этом тайлы могут рендериться в
произвольном порядке.
Для просмотра данных под
землей нужно сделать рельеф полупрозрачным. При этом важным являются порядок и
режимы отрисовки разных слоев объектов в приложении.
В случае глобуса это — рельеф, объекты на рельефе, атмосфера и звезды. В
обычной ситуации порядок отрисовки следующий: звезды
с отключенной записью в буфер глубины, потом атмосфера также с отключенной
записью в буфер глубины, потом рельеф, потом все остальные надземные объекты.
При полупрозрачном рельефе
начинают просвечивать звезды и атмосфера. Также видны объекты с противоположной
стороны планеты, что вносит путаницу. Поэтому было предложено изменить порядок отрисовки. Во-первых, рисуется черный непрозрачный
эллипсоид с центром в начале мировой системы координат, который меньше земного
на 1000 км, поскольку максимальная глубина используемых на данный момент в
приложении сейсмических данных составляет 700 км. Черный эллипсоид позволяет
впоследствии отбросить объекты с дальней стороны Земли на этапе теста глубины.
Далее рисуются подземные объекты, далее рельеф, звезды и атмосфера.
При использовании эффекта
прозрачности при визуализации рельефа возникают побочные эффекты. Картинка на
экране становится чувствительной к порядку отрисовки тайлов и к повороту камеры относительно тайла:
при определенных углах поворота камеры сквозь гористые участки рельефа начинают
просвечивать другие части рельефа. Начинают просвечивать и мешаться юбки.
Для устранения этих эффектов
было решено юбки отключить (для полупрозрачной
поверхности проблема щелей не стоит так остро), а рельеф рендерить
в 2 прохода. В первый проход происходит запись в буфер глубины при отключенной
записи в цветовой буфер. Во второй проход происходит запись в буфер цвета
только тех фрагментов, глубина которых совпадает с глубиной в буфере глубины.
Это позволяет выводить на экран только ближайшие к камере полигоны рельефа.
При смешивании цвета рельефа
с цветом подземных объектов в цветовом буфере предлагается использовать
следующую функцию:
![]() ,
,
где ![]() — итоговый цвет
фрагмента,
— итоговый цвет
фрагмента, ![]() — цвет
фрагмента в буфере глубины от подземного объекта,
— цвет
фрагмента в буфере глубины от подземного объекта, ![]() — цвет
фрагмента рельефа,
— цвет
фрагмента рельефа, ![]() — прозрачность
поверхности рельефа, которую можно регулировать. В этом случае цвет рельефа не
вносит сильного искажения в цвет подземных объектов.
— прозрачность
поверхности рельефа, которую можно регулировать. В этом случае цвет рельефа не
вносит сильного искажения в цвет подземных объектов.
2.3. Режимы отображения глобуса
Для более наглядного
представления данных реализованы различные режимы отображения глобуса:
· С атмосферой/без
атмосферы
· С текстурами/без
текстур
· С растяжением по
высоте/без растяжения
Режимы могут произвольно
комбинироваться. Также настраивается прозрачность поверхности Земли.
Для атмосферы использовалась
модель О’Нила
[10]. На данный момент она не самая реалистичная, но и сильно не
загружает видеокарту, ресурсы которой более нужны для
сейсмических данных.
Растяжение по высоте
производится в вершинном шейдере.
Вычисление прямо в шейдере высоты вершины над
эллипсоидом на основе ее декартовых координат - это довольно медленная операция
и может приводить к неточности из-за использования типа float.
Поэтому в шейдер просто передается дополнительный
вершинный атрибут с высотой.
Одним из важнейших типов
сейсмических данных являются каталоги гипоцентров землетрясений. Гипоцентр —
это центральная точка очага землетрясения. Проекция гипоцентра на поверхность
Земли называется эпицентром. Каталоги гипоцентров свободно доступны на
специализированных сайтах, например, на сайте Геологической службы США (USGS) [11],
на сайте Камчатского филиала Геофизической службы РАН [12], и др. На
сайте USGS информация о новых землетрясениях выкладывается через несколько
минут для Калифорнии и через полчаса для всего мира. Данные о гипоцентрах с
сайта USGS можно получить в разных форматах: Atom,
CSV, GeoJSON(P) и KML. При загрузке данных с сайта
можно выбрать либо глобальный каталог, либо каталог землетрясений для заданной
области. Полный каталог землетрясений для всей Земли с 1900 года включает около
1 млн. событий.
Строка
каталога с описанием гипоцентра содержит следующие поля данных: широта,
долгота, глубина, дата, время (час, мин, сек), магнитуда. При визуализации каталогов землетрясений возникает
задача фильтрации по разным параметрам: по магнитуде, по дате, по региону [13].
В традиционном подходе
данные фильтруются на центральном процессоре методом перебора либо с
использованием специальных структур данных. Но для визуального анализа нет
необходимости хранить результаты фильтрации. Фильтрацию можно осуществлять на
графическом процессоре на этапе рендеринга.
При нынешних мощностях видеокарт отрисовка и
выполнение некоторых действий даже над миллионом вершин происходит очень быстро
при условии, что это происходит за один вызов функции отрисовки.
Это позволяет значительно упростить код для хранения гипоцентров и их
фильтрации. Благодаря параллелизму фильтрация на графическом процессоре
выполняется быстрее, чем на центральном процессоре.
Координаты гипоцентров
конвертируются из географической системы координат в декартову систему
координат виртуального глобуса и помещаются в массив вершин с набором
дополнительных вершинных атрибутов: глубина, магнитуда, дата события, номер
региона. Через uniform-переменные в шейдер передаются
максимальные и минимальные значения для глубины, магнитуды, даты.
В вершинном
шейдере производится только преобразование систем
координат, а во фрагментном шейдере — выставление
переменной gl_FragColor. Основные расчеты
производятся в геометрическом шейдере.
Вычисляется размер точки, ее цвет, и принимается решение отбрасывать точку точку или нет (рис. 1, 2).
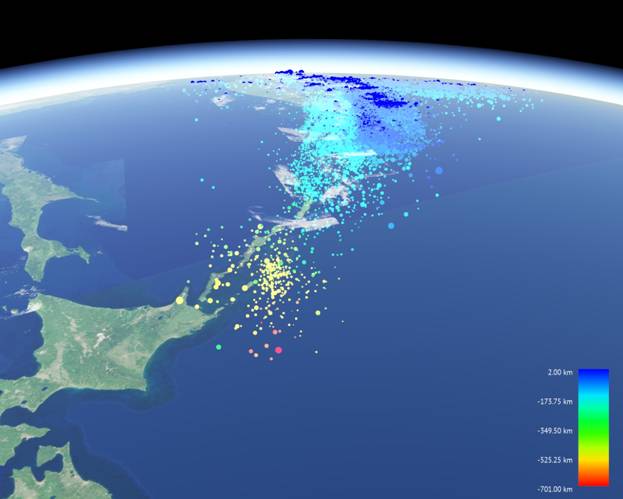
Рис 1. Региональный
каталог сейсмических событий в районе
Курило-Камчатской
дуги, по данным КФ ГС РАН [12]
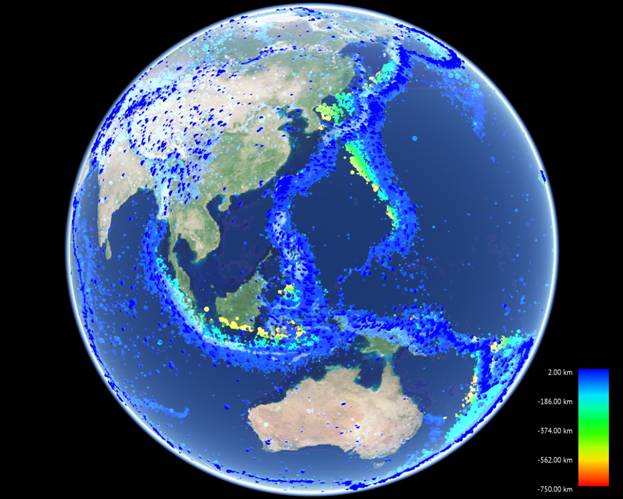
Рис. 2. Мировой каталог сейсмических
событий USGS за 1900-2011 гг,
по данным USGS [14], в редакции А. В. Ландера
(МИТП РАН)
Глубина задается своим
реальным значением (от 5км до -700км) с типом float и
используется для вычисления цвета гипоцентра. Цветовое кодирование позволяет
лучше определить глубину гипоцентра при обычном (не-стереоскопическом)
просмотре, а также является традиционным обозначением в геофизике. Цвет берется
из линейной палитры от синего на малых глубинах до красного
на больших глубинах.
Магнитуда также задается
реальным значением от 0 (если не определена) до 9.5 с типом float.
Если магнитуда землетрясения меньше минимального заданного значения или больше
максимального, то точка отбрасывается. Значения магнитуды от
минимального до максимального отображаются на диапазон размеров точек от 1го до
6ти пикселей.
Фильтрация по датам происходит
более сложно. Для хранения дат был использован тип boost::ptime
из библиотеки boost. Для передачи в шейдер дата приводится к диапазону [0; 1], где 0 —
минимальная дата среди всех гипоцентров, а 1 — максимальная дата. Для
вычисления значения даты для конкретного гипоцентра используется формула:
(разница между датой гипоцентра и минимальной датой в секундах) / (разница
между максимальной и минимальной датой в секундах). Максимальная и минимальная
даты фиксированы для каждого каталога. Для фильтрации гипоцентров по дате
задается минимальное и максимальное значение фильтра в диапазоне [0; 1] и
передается в шейдер в виде uniform-переменных. Далее
в геометрическом шейдере
производится проверка значения даты на соответствие заданному диапазону.
Однако у этого подхода есть
два недостатка. Во-первых, из-за особенностей реализации типа boost::ptime разница дат не может превышать примерно 60
лет. Для каталогов землетрясений с диапазоном дат в 100 лет приходится
применять обходной маневр. Каталог разбивается на 2 части по датам. Первая
половина отображается на интервал [0; 0.5], а вторая — на [0.5; 1]. Во-вторых,
тип float, который используется для хранения даты,
имеет точность — 7 десятичных разрядов. При интервале дат в 100 лет это
означает, что шейдер не различает гипоцентры в
пределах 315 секунд.
Также происходит фильтрация
гипоцентров по регионам. Для каждого гипоцентра хранится идентификатор региона,
к которому относится гипоцентр. При выборе алгоритма фильтрации учитывались
следующие условия: (1) регионы не пересекаются и (2) одновременно можно
выбирать несколько регионов.
Для реализации фильтрации
возможны 2 подхода. Первый — использование битовых флагов. В этом походе
идентификатор региона является степенью двойки, т.е. каждому региону
соответствует свой бит. Идентификаторы всех выбранных регионов складываются (то
же самое, что и операция ”побитовое или”). Полученное число передается в виде
uniform-переменной. В шейдере применяется операция ”побитовое и” для принятия решения: оставить или отбросить
вершину. Преимущество этого подхода — большая скорость работы, недостаток —
ограничение на число регионов.
Второй подход —
использование uniform buffer.
В этом подходе номера выбранных регионов передаются в виде массива в шейдер. Далее для каждой вершины в цикле проверяется, что
ее идентификатор присутствует в массиве. Преимущество этого метода — поддержка
большого числа регионов, минус — меньшая производительность.
Нами тестировался набор из
10 регионов для Курило-Камчатской
дуги и поэтому был использован метод на основе битовых флагов.
Приложение позволяет загружать из файлов несколько
каталогов одновременно. Каталоги хранятся отдельно в разных массивах вершин.
Это сделано, чтобы можно было легко включать и отключать отдельные каталоги.
Для каждого каталога отдельно хранятся диапазоны глубин и дат. И отдельно
хранятся глобальные диапазоны для всех каталогов и других видов сейсмических
данных. Эти глобальные значения передаются в шейдеры,
чтобы все данные отображались согласованно.
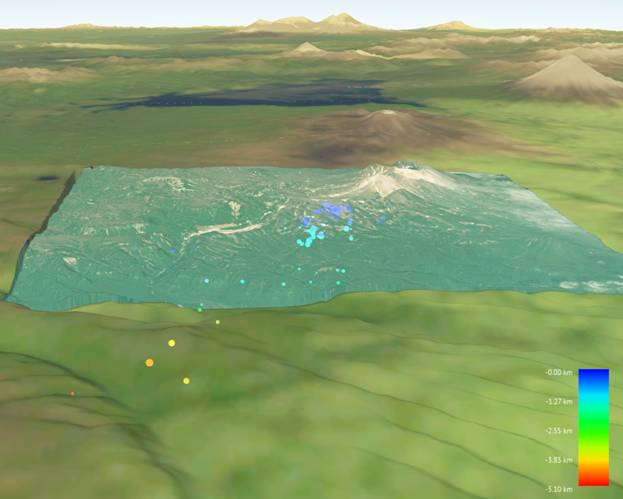
Рис. 3. Локальная сейсмичность в районе Долины гейзеров на Камчатке
в 2008-2009 гг, по данным Ю. А. Кугаенко и др., КФ ГС РАН [15]
При показе данных локальной
сейсмичности глобус представляет возможность
визуализации локального рельефа с высокой детальностью (рис. 3).
Еще один важный вид
подземных данных — это форма зон субдукции (рис. 4).
Зоны субдукции — места, где литосферные
плиты погружаются в мантию. Это места концентрации землетрясений. Форма зон субдукции выложена на сайте USGS. Данные представлены в
виде двумерной матрицы глубин с шагом 0.2 градуса по долготе и широте. Пустые
поля соответствуют отсутствию зоны субдукции в данных
точках. По набору точек можно легко восстановить трехмерную поверхность из
треугольников. Для каждой вершины задается атрибут — глубина по аналогии с
гипоцентрами. Рендеринг производится в шейдере, где на основе глубины вычисляется цвет. В шейдер также передаются глобальные значения максимальной и
минимальной глубины в виде uniform-переменных, чтобы цвет гипоцентров и зон субдукции был одинаковым на одинаковых глубинах.
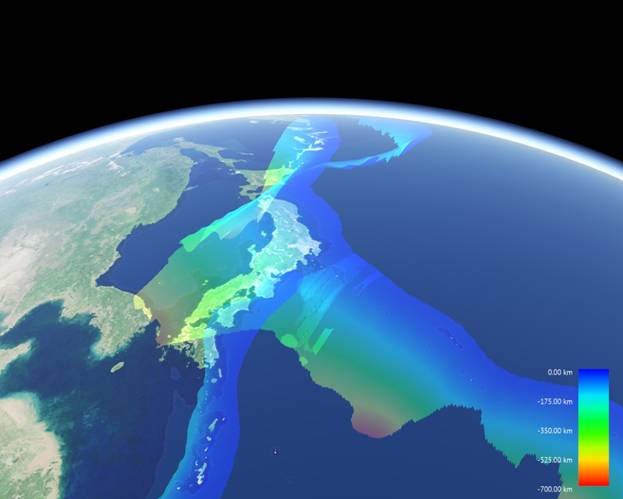
Рис. 4. Форма
зоны субдукции в районе Японии, по данным USGS [16]
Для подчеркивания сложной
формы зон субдукций используется затенение с помощью
источника света, привязанного к камере. Поскольку расчет освещения происходит в
шейдере в видовой системе координат, то вектор
направления на источник света берется просто (0, 0, -1).
2.6. Сейсмическая регионализация
Землетрясения, происходящие
в районе Курило-Камчатской
дуги, имеют различную тектоническую природу. Разнообразие тектонических
обстановок требует строгого разделения существующих и непрерывно развивающихся
каталогов землетрясений с возможно более точной идентификацией природы каждого
сейсмического события. С этой целью на основе
накопленной на сегодняшний день информации о пространственном распределении и
механизмах землетрясений и с учетом современных представлений о новейшей
тектонике региона проведена регионализация сейсмоактивного объема Камчатки и
прилегающих областей.
Согласно представлениям А.
В. Ландера (МИТП РАН), каждый регион задается
призмами сложной формы. Каждая призма имеет 2 крышки (верхнюю и нижнюю) в
географических координатах. Такие призмы называются базовыми фигурами. Реальные
регионы являются результатом булевский операций над
базовыми фигурами. Фигуры можно объединять, вычитать и брать их пересечение.
Помимо задачи определения
принадлежности гипоцентра конкретному региону встает задача визуализации границ
самого региона. Если показать базовую фигуру — достаточно простая задача, то
логические операции представляют определенные сложности.
Существует два основных
подхода к булевским операциям: основанный на геометрии и основанный на
изображении.
Подход, основанный на
геометрии, генерирует полигональную 3D-модель
результирующей фигуры после применения булевских операций. Преимуществом этого
подхода является возможность сохранения полученной модели в файл для
последующего использования. Минусы подхода: большая сложность и медленность
алгоритмов. Возможно появление артефактов в сложных случаях. Большую роль
играют ошибки округления.
Подход, основанный на
изображении, генерирует изображение результирующей фигуры на экране без
использования отдельной геометрии. Рендерятся только
базовые фигуры в несколько проходов с разными параметрами отрисовки
(используется буфер трафарета). Преимуществом данного подхода является большая
простота (хотя для вогнутых фигур алгоритм существенно усложняется). Также
появляется возможность динамического изменения базовых фигур. Это особенно
актуально в случае глобуса, т.к. необходимо изгибать крышки призм в
соответствии с поверхностью глобуса. При приближении к поверхности можно
производить динамическую тесселяцию
крышек.
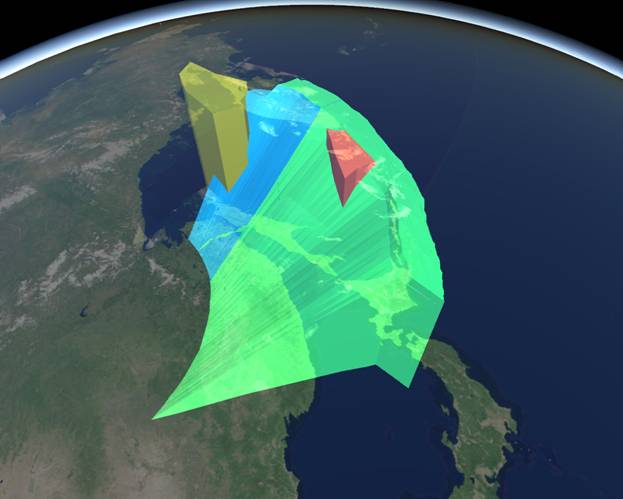
Рис. 5. Границы
сейсмических регионов в районе
Курило-Камчатской дуги, по
данным А. В. Ландера (МИТП РАН)
Для реализации булевских
операций с вогнутыми фигурами нами был модифицирован алгоритм Голдфезера с применением шейдеров,
основанный на изображении [17]. В этом алгоритме каждый регион сначала рендерится в текстуру с помощью фреймбуфера,
а потом результат переносится в основной буфер (рис. 5).
В настоящее время активно
развивается направление сейсмотомографии [18][19].
По аналогии с медицинской томографией сейсмотомография
позволяет получить распределение некоторых пространственных характеристик
земной коры путем анализа данных с сети сейсмостанций, регистрирующих
сейсмические волны от землетрясений.
Землетрясения создают продольные и поперечные волны,
которые обозначают буквами P и S соответственно. Скорости распространения
сейсмических волн различны и зависят от модуля упругости и плотности среды. Это
позволяет идентифицировать некоторые характеристики земной коры на пути
следования сейсмических волн. Результатом обработки множества данных является
трехмерная матрица (воксельный массив), в ячейках
которой записано значение отношения скоростей P-волн и S-волн в данной точке.
Каждая ячейка матрицы (воксель) имеет координаты:
долгота, широта, глубина.
Для визуализации этих данных
был использован прямой объемный рендеринг [20].
Для хранения объемных данных на GPU используется 3D-текстура. В ней хранится не
цвет, а условная ”плотность” — значение параметра Vp/Vs. Отдельно задается передаточная функция (transfer function), которая
ставит в соответствие плотности цвет и прозрачность.
Для небольших объемов можно
считать Землю локально плоской и выводить объем в виде куба. При этом был
использован метод обратной трассировки лучей. Для каждого пикселя экрана
пускается луч через объем. С некоторым шагом из объема выбираются значения
плотности, вычисляется и суммируется цвет на основе передаточной функции.
Использованы различные
модификации метода: показ изоповерхностей, проекции максимальной интенсивности.
Для анализа взаимного расположения подземных структур с различными
соотношениями Vp/Vs
добавлена поддержка двух изоповерхностей.
Рендеринг тестировался на объемных данных под Ключевской
группой вулканов (рис. 6). Размер матрицы 121х81х46, шаг по XY — 1 сек, по Z —
1 км. Объем расположен не полностью под поверхностью эллипсоида, но поднимается
над ним на высоту 5 км. Большая часть надземного объема заполнена пустыми
значениями. Меньшая часть содержится внутри вулкана. Реализовано корректное
отображение рельефа поверх объема.
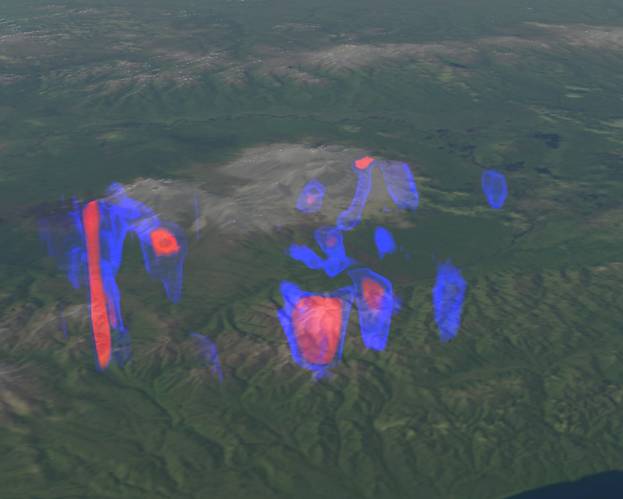
Рис. 6.
Визуализация результатов сейсмической томографии в районе Ключевской группы
вулканов на Камчатке за 2004 год, по данным И. Ю. Кулакова (ИНГГ СО РАН)
Для больших объемов уже
необходимо учитывать кривизну Земли. Для этого метод обратной трассировки лучей
подходит хуже. Поэтому был использован метод слоев. Каждый слой является частью
эллипсоида, параллельного земному эллипсоиду.
В ходе сейсмических и
вулканических процессов характеристики и структура земной коры меняются. Эти
изменения можно наблюдать, сравнивая данные сейсмотомографии
за разные промежутки времени. Особенно явно видны изменения в области активной
вулканической деятельности. Нами поддержана плавная анимация объемной картинки
во времени.
2.8. Геологические модели и анимация извержений
Комплексная визуализация
сейсмических данных, связанных с вулканической активностью, может быть
дополнена показом геологических моделей (границы тектонических плит, структуры
очага и каналов) и анимацией извержений. Движение магмы к земной поверхности,
сопровождается роями землетрясений, изменениями скоростей распространения
сейсмических волн под вулканическим комплексом. Согласованный показ всех этих
данных дает возможность комплексного анализа динамики процесса.
Подземная часть системы
состоит из канала, по которому поступает магма. Канал задается полигональной
моделью. Поскольку реальная форма канала не известна, то можно сгенерировать
произвольный канал путем фрактальной деформации конуса или цилиндра. Показ
движения магмы в канале реализован на уровне шейдеров.
В вершинном шейдере срезается часть
канала, чтобы было видно сечение, и рассчитываются нужные цвета сечения, исходя
из параметров, которые передаются в виде uniform-переменных. Надземная
часть извержения визуализируется в виде системы частиц.
Разработано приложение для
визуализации различных видов сейсмических данных и сейсмических явлений на базе
виртуального глобуса. Приложение использует свободную библиотеку osgEarth для генерации и рендеринга
самого глобуса на основе геопривязанных изображений.
Были внесены изменения в код osgEarth для поддержки
прозрачного рельефа и переключения различных режимов отображения глобуса во
время работы приложения (атмосфера, растяжение по высоте, отключение текстур).
Протестированы региональные и мировые каталоги
землетрясений, содержащие до 1 миллиона событий. Разработаны средства поддержки
для показа зон субдукции, выделения объемных зон
землетрясений с типичными тектоническими характеристиками, границ тектонических
плит. Реализована визуализация данных сейсмотомографии
с тестированием на примере района Ключевской группы вулканов с помощью прямого
объемного рендеринга. Реализована визуализация
геологических моделей и анимации. Поддержана стереоскопическая визуализация.
Отображение разных видов
сейсмических данных в едином контексте на базе глобуса позволяет анализировать
зависимости между данными. При этом оказалось очень важным использование
стереоскопического просмотра. Это позволяет визуально отделить группы
гипоцентров между собой и подземные объекты от объектов, расположенных на
поверхности Земли.
Разработанное приложение используется для демонстрации
результатов геофизических исследований на постоянно действующей выставке РАН.
Планируется дальнейшее развитие приложения путем добавления новых видов данных
и инструментов анализа данных.
Авторы выражают
благодарность: Кугаенко Ю.А. (КФ ГС РАН), Кулакову
И.Ю. (ИНГГ СО РАН), Ландеру А.В. (МИТП РАН) за
предоставленные исходные данные и научные консультации; Батурину Ю.М. (ИИЕТ
РАН), Гордееву Е.И. (ИВиС ДВО РАН), Клименко С.В. (ИФТИ), Маловичко
А.А. (ГС РАН) за поддержку.
[1] Гордеев Е.И., Чебров В.Н., Левина
В.И., Сенюков С.Л., Шевченко Ю.В., and Ящук В.В., “Система
сейсмологических наблюдений на Камчатке,” Вулканология и сейсмология, vol. 3, pp. 6–27, 2006.
[2] Гордеев Е.И., Чебров В.Н., Левина
В.И., Бахтиярова Г.М., Сенюков
С.Л., and Пантюхин Е.А.,
“Банк сейсмологических данных Камчатки,” Открытое образование, vol. 4, pp. 16–22, 2008.
[3] Michael F. Goodchild, “What does google
earth mean for the social sciences?,” in Geographic Visualization: Concepts, Tools
and Applications. Wiley, 2008.
[4] Martin Turner Martin Dodge,
Mary McDerby, Geographic
Visualization: Concepts, Tools and Applications, Wiley, 2008.
[5] T. Paraskevas, “Virtual Globes and Geological Modeling,” International Journal of Geosciences,
vol. 2, no. 4, pp. 648–656, 2011.
[6] Aijun
Chen and John Bailey, Eds., Virtual
Globes in Science, vol. 37, 2011.
[7] Patrick Cozzi
and Kevin Ring, 3D Engine Design for
Virtual Globes, CRS Press, 2011.
[8] Earthquake 3D, ,” http://www.wolton.net/quake.html.
[9] GA World Wind Suite, ,” https://github.com/ga-m3dv/ga-worldwind-suite.
[10] S. O’Neal,
“Accurate atmospheric scattering,” GPU
Gems, vol. 2, pp. 253–268, 2005.
[11] USGS, ,” http://usgs.gov/.
[12] КФ ГС РАН, ,” http://www.emsd.ru/.
[13] Белосохов Д.Е., Бобков А.Е., and Леонов А.В., “Возможности 3D-визуализации для
эффективного представления результатов научных исследований,” in Проблемы
комплексного геофизического мониторинга Дальнего Востока России. Труды Третьей научно-технической конференции. Петропавловск-Камчатский.
9-15 октября 2011 г., Чебров В.Н., Ed., 2011, pp. 347–351.
[14] Каталог землетрясений USGS, ,”
http://earthquake.usgs.gov/earthquakes/feed/.
[15] Кугаенко Ю.А., Салтыков В.А., and Коновалова А.А., “Локальная сейсмичность района Долины
Гейзеров по данным полевых наблюдений 2008-2009 гг.,” Вестник КРАУНЦ. Науки о земле, vol. 1, 2010.
[16] Зоны субдукции USGS, ,”
http://earthquake.usgs.gov/research/data/slab/.
[17] Jack Goldfeather, S. Monar, Greg Turk,
and Henry Fuchs, “Near real-time CSG rendering using tree normalization and
geometric pruning,” IEEE Computer
Graphics and Applications, vol. 9, pp. 20–28, 1989.
[18] Кулаков И.Ю., “Геодинамические процессы в коре и верхней мантии
земли по результатам региональной и локальной сейсмотомографии,” ИГМ СО РАН, 2007, Диссертация на соискание ученой степени
доктора геолого-минералогических наук.
[19] I. Koulakov,
E.I. Gordeev, N.L. Dobretsov,
V.A. Vernikovsky, S. Senyukov,
and A. Jakovlev, “Feeding paths of the Kluchevskoy volcano group (Kamchatka) from the results of
local earthquake tomography,” Geophys. Res. Lett., vol. 38, 2011.
[20] Klaus Engel, Markus Hadwiger, Joe M. Kniss, Aaron E. Lefohn, Christof Rezk Salama, and Daniel Weiskopf, “Real-time volume graphics,” 2004.
Visualization
of seismic data on a virtual globe
A. Bobkov1, A. Leonov2, V. Chebrov3
1 Moscow Institute of Physics and Technology, Moscow, Russia
2 Vavilov Institute for the History of Science and Technology of the Russian Academy of Sciences, Moscow, Russia
3 Kamchatka Branch of the Geophysical Service of the Russian Academy of Sciences, Petropavlovsk-Kamchatsky, Russia
alexander.e.bobkov@gmail.com, a.leonov@ihst.ru, chebr@emsd.ru
Abstract
Methods of three-dimensional modeling of deep structures and the visual analysis of data (primarily derived from networks of instrumental observations) are actively developing in geophysics. However, the presentation of the data is still based mostly on conservative methods like flat surface maps and cross-sections of the Earth. At the same time a trend of virtual globes is becoming popular. It is related with the development of new hardware (GPU) and software (NASA World Wind and osgEarth).
The article describes 3D-visualization of seismic data on the basis of a transparent virtual globe: catalogs of earthquakes, subduction zones, seismic regions, the data of seismic tomography, etc. Several methods are proposed in the article: the method of rendering and filtering of the arrays of a point data on GPU (for the catalogs of earthquakes), volume rendering techniques adjusted for the curvature of the Earth’s surface (for the seismic tomography), the methods of correct rendering of a transparent terrain in coordination with other objects, methods of visualization and animation of various underground processes.
Authors developed an application for a consistent 3D-visualization of the seismic data in a single context with easy adjustment of display modes. The application supports different stereoscopic display devices. Stereo-mode allows the visual separation of the groups of hypocenters as well as visual separation of underground objects from the objects, located on the surface of the Earth.
Keywords: Virtual Globe, Virtual Environment,
Geophysics, Earthquakes, Seismotomography.
References
[1] Gordeev
E.I., Chebrov V.N., Levina
V.I., Senyukov S.L., Shevchenko Y.V., and Yashchuk V.V., “System of seismological observations on
Kamchatka”, Volcanology and Seismology, vol. 3, pp. 6–27, 2006.
[2] Gordeev
E.I., Chebrov V.N., Levina
V.I., Bachtiyarova G.M., Senyukov
S.L., and Pantyuchin E.A., “Bank of seismological
data of Kamchatka”, Open Education, vol.
4, pp. 16–22, 2008.
[3] Michael F. Goodchild, “What does google
earth mean for the social sciences?”, in Geographic Visualization: Concepts, Tools
and Applications. Wiley, 2008.
[4] Martin Turner Martin Dodge,
Mary McDerby, Geographic Visualization:
Concepts, Tools and Applications, Wiley, 2008.
[5] T. Paraskevas, “Virtual Globes and Geological Modeling”, International Journal of Geosciences,
vol. 2, no. 4, pp. 648–656, 2011.
[6] Aijun Chen and John Bailey, Eds., “Virtual Globes in Science”, vol. 37, 2011.
[7] Patrick Cozzi and Kevin Ring, “3D
Engine Design for Virtual Globes”, CRS Press, 2011.
[8] Earthquake 3D. Available at: http://www.wolton.net/quake.html
[9] GA World Wind Suite. Available at: https://github.com/ga-m3dv/ga-worldwind-suite
[10] S. O’Neal,
“Accurate atmospheric scattering”, GPU Gems,
vol. 2, pp. 253–268, 2005.
[11] USGS. Available at: http://usgs.gov/
[12] Kamchatka branch of the
Geophysical Service of Russian Academy of Science. Available at: http://www.emsd.ru/
[13] Belosokhov
D.E., Bobkov A.E., and Leonov
A.V., “3D-visualization opportunities for efficient presentation of science
investigations” , in Problems of complex geophysical monitoring on Far East of Russia. Proceedings of 3rd scientific and technical conference. Petropavlovsk-Kamchatsky. 9-15 october 2011 г., Chebrov V.N., Ed., 2011, pp.
347–351.
[14] USGS earthquakes catalog. Available at: http://earthquake.usgs.gov/earthquakes/feed/
[15] Kugaenko
Y.A., Saltikov V.A., and Konovalova
A.A., “Local seismicity of Valley of Geysers region based on field observations
in 2008-2009,” Herald of KRAUNCH. Earth sciences, vol. 1, 2010.
[16] USGS Subduction
zones. Available at: http://earthquake.usgs.gov/research/data/slab/
[17] Jack Goldfeather, S. Monar, Greg Turk,
and Henry Fuchs, “Near real-time CSG rendering using tree normalization and
geometric pruning”, IEEE Computer
Graphics and Applications, vol. 9, pp. 20–28, 1989.
[18] Koulakov
I.Y., “Geodynamic processes in the crust and upper mantle of the Earth based on
results of regional and local seismotomography”, IGM
SB RAS, 2007, Doctoral dissertation
[19] I. Koulakov,
E.I. Gordeev, N.L. Dobretsov,
V.A. Vernikovsky, S. Senyukov,
and A. Jakovlev, “Feeding paths of the Kluchevskoy volcano group (Kamchatka) from the results of
local earthquake tomography,” Geophys. Res. Lett., vol. 38, 2011.
[20] Klaus Engel, Markus Hadwiger, Joe M. Kniss, Aaron E. Lefohn, Christof Rezk Salama, and Daniel Weiskopf, “Real-time volume graphics,” 2004.