 б)
б) 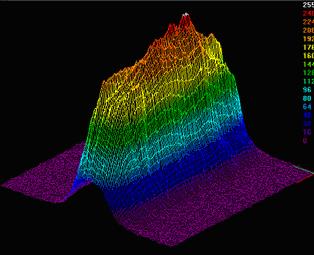 в)
в) 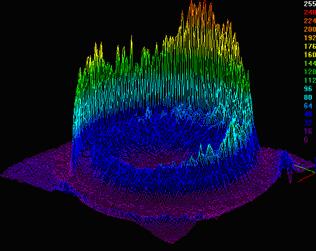
А.А. ЯРОВОЙ, А.М. ЯРОВОЙ*
Винницкий национальный технический университет, Украина
*Винницкий финансово-экономический университет, Украина
a.yarovyy@gmail.com (А.А. Яровой)
Оглавление
Описаны результаты исследований философско-методологического и научно-прикладного аспектов технологий визуализации в контексте анализа специфических задач профилирования лазерных лучей. Рассматриваются характеристики комплекса инструментальных программных средств визуализации процесса профилирования лазерных лучей. Приведены примеры прикладных программ с визуализацией процесса профилирования лазерных лучей, а также результаты их апробации в задачах идентификации и определения энергетического центра изображений профиля лазерного луча, полученных в процессе их компьютерного моделирования.
Ключевые слова: анализ данных, технологии визуализации, интеллектуально-информационные технологии, профилирование лазерных лучей, графическая интерпретация.
Среди фундаментальных комплексных проблем, связанных с исследованием современных интеллектуально-технологических трансформаций, визуализации принадлежит особенное место. Данная проблема ещё более актуализируется, если её рассматривать в контексте совместных исследований и достижения сближения позиций между гуманитарно-философской и технической сферами. В этом отношении большое значение приобретает такой уровень исследований, который предполагал бы соединение конкретного научно-технического и философско-методологического анализа, и осмысления указанной проблематики. Именно на основании таких исследований и их результатов авторы пытаются по новому осмыслить феномен визуализации.
Основной целью настоящей работы является исследование двух аспектов технологий визуализации философско-методологического и научно-прикладного, в контексте анализа специфических задач профилирования лазерного луча (с указанием перспективы дальнейшего расширения прикладного применения технологий визуализации, в частности на примере решения задач профилирования лазерного луча). Авторы, основываясь на новых научно-технических и философско-методологических подходах, утверждают, что визуализация как информационно-интеллектуальная технология порождает философско-гносеологические и методологические инновации в системе анализа не только искусственного, но и естественного интеллекта человека.
В начале проанализируем инновации, которые порождают новые философско-методологические и эпистемологические подходы в анализе самой визуализации как интеллектуально-информационного феномена. Мы склонны считать, что важность феномена визуализации выходит за границы технических наук, как, впрочем, и всех наук об искусственном интеллекте. Особенный статус визуализация приобретает даже не столько в общественном, сколько на общественно-культурном уровне. Именно в таком выражении возникает острая потребность в философском анализе своеобразной ситуации, которая на современном этапе складывается в системе науки, философии и культуры, и тех уникальных тенденций, которые инициирует данная интеллектуальная технология.
Указанные процессы, которые касаются активизации визуализации как новейшей информационно-интеллектуальной технологии (если их рассматривать в более широком контексте) совпадают по времени с началом существенных парадигмальных трансформаций, которые разворачиваются в современной философии науки. Тотальная критика рационализма, активное распространение идеологии постмодернизма поднимают глобальный и актуальный вопрос о необходимости перехода к новым, нерационального типа парадигмам мышления. В данной ситуации оказывается, что рационалистическая модель это не единственная в своём роде парадигма мышления. Существуют другие нерационального типа модели (парадигмы мышления), которые не менее конструктивны, а возможно, даже более приоритетные, чем рационалистическая. Мы склонны утверждать, что визуализация и есть та первая нерационального типа интеллектуально-информационная технология, которая активно пытается утвердить приоритет и доминанту нерациональных парадигм. Гносеологический смысл визуализации как тенденции развития современных искусственных интеллектуальных систем соответствует чувственно-образным механизмам естественного интеллекта человека. Ведь по своей гносеологической природе чувственно-образное мышление (в этом его принципиальное отличие от рационального) сориентировано на отображение индивидуальности в предмете, в то время как рациональное, через разработку и оперирование абстрактно-логическими формами, достигает отображения общего (типичного).
Все это выражает актуальность подходов визуализации, что в интеграции являет собой эффективную методику в решении целого класса интеллектуальных задач из самых различных сфер практического применения.
В данное время в отраслях лазерной обработки материалов, лазерной локации, оптической связи, полиграфии и других областях техники чувствуется острая необходимость более широкого внедрения оптоэлектронных систем с автоматической корректировкой погрешностей формируемого светового излучения. Причинами этих погрешностей могут быть: дестабилизирующее влияние механических или климатических факторов, нестабильность характеристик источника излучения, помехи в оптическом тракте и т.п. Обеспечение приемлемого качества коррекции требует непрерывного динамического контроля характеристик светового излучения, например его профиля, пространственного распределения его интенсивности, в том числе оценки отклонения отмеченного распределения от выходного или эталонного распределения.
Рассматриваемые в данной статье подходы к решению отдельных задач в процессе профилирования лазерных лучей являются составной частью проводимых научных исследований одной из научных школ Винницкого национального технического университета "Оптико-электронные информационно-энергетические технологии" (основатель и руководитель – акад., проф. Владимир П. Кожемяко; ответственный за данное направление – проф. Леонид И. Тимченко) [2,8-12,17]. В данной статье приведены результаты исследований, в которых основной упор был сделан на решение одной из задач профилирования – обработки пятенных изображений лазерных пучков (взятых из видео-трассы) в реальном времени с повышенной точностью измерения координат их энергетических центров. Данная задача основывается на использовании метода моментных признаков [24], аппроксимации, экстраполяции и т.п. В данном случае – это организация сложного вычислительного процесса, с отображением результатов классификации изображений и больших массивов цифровой информации координат их энергетических центров. Данные результаты являются важной составляющей частью в процессе профилирования лазерных лучей. Но именно в этой задаче мы пытаемся показать, что существует острая необходимость не просто организации вычислительного процесса и выдачи цифрового массива результатов, а использования возможностей и технологий визуализации (отображение не только в 2D, но и в 3D; использование методов распознавания 3D-объектов) для отображения сущности изменений, которым подвергается лазерный луч, что естественным образом приводит к повышению эффективности как самого процесса, так и работы экспертов (эксперты, которые работают с программными комплексами профилирования лазерного луча, принимают решения не только относительно влияний внешней среды на луч, а также о необходимости калибрации лазерной системы). Эти комплексные научные исследования проводятся на протяжении длительного периода в сотрудничестве с НПО "Астрофизика", г. Москва (Юрий Ф. Кутаев – Главный конструктор ГНЦ РФ ФГУП «НПО Астрофизика»), которые предоставили реальные видео-трассы изображений лазерного луча для научных исследований. Они занимаются на высоком уровне научными и инженерными работами по разработке и настройке лазерных систем, профилированию лазерных лучей, оптической астрополяриметрии и т.п. [4,8,10,11].
Сущность измерения профиля луча заключается в том, что плотность энергии, концентрация и коллимация света являются его взаимосвязанными составными характеристиками. Распространение лазерного луча в пространстве значительно изменяет его профиль. Например, на рис. 1 приведены обычные профили лазерного луча, которые иллюстрируют существующую их разновидность. Так как приведенные разновидности присутствуют в профилях лазерного луча, важное значение приобретает проблема измерения профиля лазерного луча для разнообразных практических приложений, особенно если плотность энергии связана с производительностью лазера [1 ,2 ].
a) б) в)
Рис. 1. Разновидности лазерных профилей [1]:
а) HeNe , б) эксимерный лазер, в) азотный кольцевой лазер
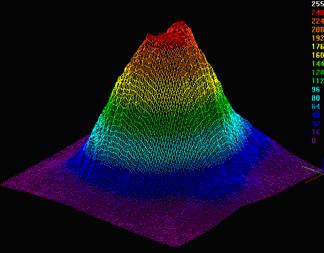
Примером двух разных типов профилей идеальных лазерных лучей для разных практических целей является луч Гаусса и луч с плоской вершиной [1]. Луч Гаусса предусматривает максимальную концентрацию сфокусированного света, а лучи с плоской вершиной предусматривают неизменное распределение энергии на определенном участке. Примеры профилей этих двух лучей изображены на рис 2.
а) 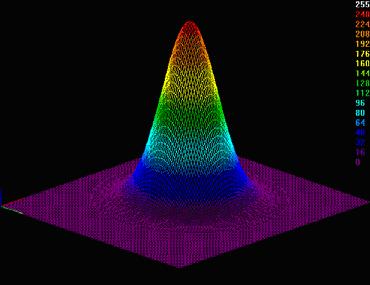 б)
б) 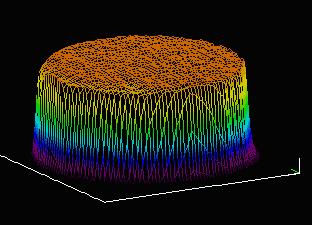
Рис. 2. Типы профилей идеальных лазерных лучей [1]:
а) идеальный луч Гаусса для наибольшей концентрации энергии;
б) идеальный луч с плоской вершиной для стабильного лазерного излучения
Однако на практике лазеры редко отображают наиболее неизменный инфракрасный профиль. Порой лазерные лучи Гаусса неравномерно высокоструктурированы, а лазерные лучи с плоской вершиной – неравномерные по всей вершине. Рис. 3 иллюстрирует некоторые реальные примеры деформированных профилей луча. Например, высокоструктурированный луч не фокусировал бы энергию, как идеальный луч Гаусса (рис. 3а). Лазерный луч с деформированной плоской вершиной не давал бы равномерного излучения как идеальный, и мог бы повлечь значительные деформации в процессе его дальнейшего применения (рис. 3б) [1 -3 ].
а) 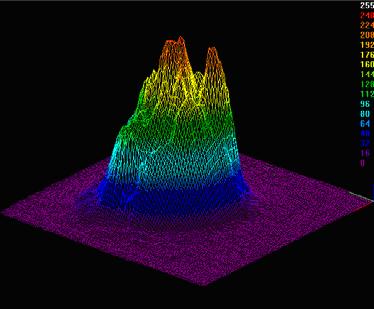 б)
б) 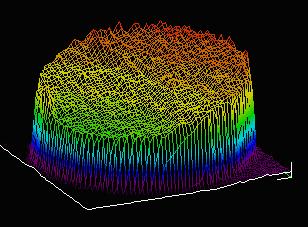
Рис. 3. Примеры деформированных профилей
лазерного луча Гаусса и луча с плоской вершиной [1,3]
Значения деформированных профилей лазерного луча изменяются в зависимости от практического применения. Такие „не Гауссовые” профили могут иметь пиковую энергию, меньше на 50% от той, которую луч Гаусса имел бы от общей мощности или энергии при тех же условиях. Поэтому в случае нелинейного процесса это может приводить к существенным потерям (12 % или 25 %) от ожидаемых значений пиковой энергии. Это приводит, в свою очередь, к 300% или 700% ошибки на эксперименте, который должен быть точным в пределах ±5% [2,3].
Устройства, которые используют лазеры, такие как принтеры, волоконная оптика, устройства связи и прочие, нуждаются в высокой степени контроля лазерного луча, чтобы корректно выполнять заданные пользователем задачи. Равномерность, направленность и стабильность, а также картина поля моды лазерного луча обычного лазерного диода, который применяется в устройствах, могут резко искажаться за счет разрегулирования и нецентрированности коллимирующей оптики установки, которая влечет к неожиданному снижению производительности устройства.
Поэтому для разных прикладных задач являются актуальными научные разработки, направленные на точное определение характеристик профиля лазерного луча, а также координатных характеристик изображений лазерной трассы с последующей возможностью прогнозирования координат лазерных изображений в произвольные моменты времени. Большое внимание уделяется данному научному направлению и в США, подтверждением этого являются аналогичные научные исследования и программно-аппаратные разработки некоторых ведущих американских корпораций, таких как Photon Inc. (San Jose, California, USA), Spiricon Inc. (Logan, Utah, USA), Coherent Auburn Group (Auburn, California, USA).
Существует большое количество групп методов измерения профиля лазерного луча, такие как неэлектрические методы, электронные методы, методы на основе механических сканирующих устройств, а также методы на основе специализированных камер (в том числе CCD). Такие камеры как CCD используются для волн видимого диапазона или пироэлектрических волн, для других длин волн используются соответственно другие виды камер. Современное программное обеспечение дает очень четкие 2d и 3d изображения лазерной трассы, а также выполняет сверхсложные цифровые операции анализа соответствующих составных характеристик профиля лазерного луча [1-3].
Пространственное распределение интенсивности лазерного луча зависит от механических, термических и электромагнитных переменных, которыми создан пучок. Двумерный и трехмерный профили лазерного луча, показанные на рис. 4, отображают результат распределения интенсивности в интуитивно простом, несложным в интерпретации способе. В то же время неэлектронные методы не могут обеспечить такой уровень точности, особенно при использовании излучения в ультрафиолетовом или инфракрасном диапазонах. Поэтому указанные профили стали общепринятым средством при настройке лазеров, ценным аналитическим инструментом при диагностике проблем, связанных с использованием лазеров [1,2,4].
а) 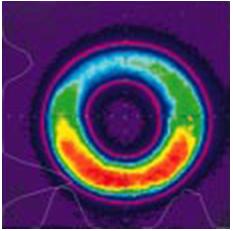 б)
б) 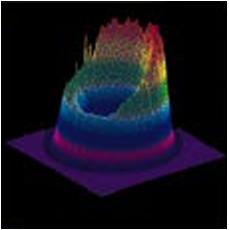
Рис. 4. Типичный двумерный (а) и трехмерный (б) профили лазерного луча, которые показывают его детальную структуру в режиме реального времени [1]
Электронное профилирование лазеров на основе камер является проще других методов [1,5], оно является линейным и отображает в режиме реального времени пространственную интенсивность всего луча, не образует вредные газы, и обеспечивает не только постоянную точную регистрацию профиля луча, но и количественное вычисление основных параметров луча, которые могут быть использованы для настройки и диагностики. Такие системы могут давать изображения в режиме реального времени, могут определять отдельные импульсы всего в несколько фемтосекунд, и в то же время достаточно устойчивые [1,3,5].
Оборудование систем электронного профилирования лазерного луча обычно включает следующие основные компоненты: цифровая камера (с соответствующим интерфейсом, например Fireware); система перемещения камеры на базе контролера шагового двигателя, управляемого пользователем; современная компьютерная система; карта механизма захвата кадра для преобразования сигнала в цифровую форму; а также программное обеспечение управления картой механизма захвата кадра с помощью показа профилей лазерного луча и осуществления соответствующих количественных вычислений необходимых характеристик, которые являются составляющими профиля. Дополнительными чрезвычайно важными сервисными функциями, по мнению авторов, являются интеллектуальные программные средства анализа, диагностирования, распознавания, классификации и прогнозирования составных характеристик профиля лазерного луча. Однако указанные интеллектуальные сервисные функции либо не достаточно, либо вообще не рассматриваются в зарубежных аналогах [1,3-5]. Поэтому разработка такой интеллектуальной системы является научной новизной в данном направлении исследований.
Рассмотрим в общем виде аппаратный состав самой простой системы измерения профиля луча полупроводниковой лазерной системы (рис.5) [1,6,7].
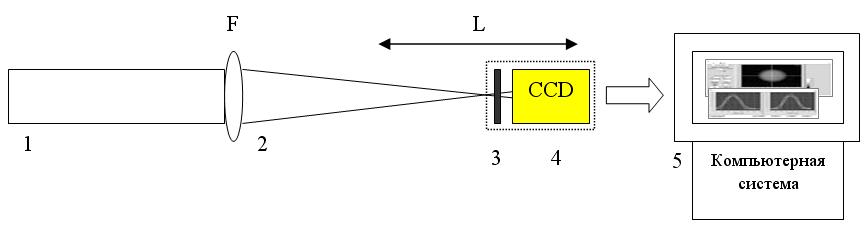
Рис. 5. Схема измерения профиля луча полупроводниковой лазерной системы:
1 - лазерное излучение, 2 - фокусирующая линза, 3 - система нейтральных фильтров,
4 - ПЗС-камера, 5 - компьютерная система введения и обработки изображения [1,6,7].
С помощью приведенной системы профилирования лазерного луча можно измерять следующие основные характеристики полупроводниковой лазерной системы [1,6,7]:
- профиль пучка в произвольном пересечении;
- элиптичность пучк а;
- длина и радиус перетяжки;
- угловое разногласие;
- центр масс пучка;
- диаметры пучка D ox и D oy ;
- параметр качества лазерного пучка M
.
Сначала сосредоточим внимание на проблеме исследования соответствий между функцией деформации и геометрическими характеристиками 2D изображений профиля лазерного луча, в частности, на разработке методов анализа разброса геометрических характеристик сигнала лазерной трассы и их возобновления. В последующем, на основе полученных результатов, сконцентрируемся на проблеме разработки аппаратно-программных средств обработки пятенных изображений лазерных пучков в реальном времени с повышенной точностью измерения координат энергетических центров, как составных характеристик профиля лазерного луча.
Цель предложенного подхода [ 8,9 ] можно обобщить таким образом. Пусть Y(t) – исходный вектор сигнала, и Y'(t)=X(g(t)) – анализируемый деформированный вектор, который обусловливается действием дестабилизирующих факторов (где g(t) – функция деформации). Чтобы осуществить анализ, с помощью которого возможно возобновить вектор Y'(t), нужно геометрически охарактеризовать сигнал. Ключевая идея заключается в следующем:
1) для несмещенного деформированного вектора находятся оптимальные нелинейные весы всех компонент;
2) для сдвинутого деформированного вектора находится его сдвиг с помощью взаимосвязи коэффициентов аппроксимации;
3) устранение ошибок, которые появляются из-за дискретизации и статистических параметров.
В предыдущих работах показано, что есть ряд соответствий между функцией деформации g(t) и факторами аппроксимации, а также разбросом геометрических характеристик сигнала, который ограничен разнообразными порогами [ 10,11 ]. В проведенных экспериментах достоверность возобновления геометрических характеристик сигнала превосходит другие методы, основанные на традиционных средствах аппроксимации.
Рассмотрим исходные сигналы на примере последовательностей серий лазерных изображений [2,4,9]. Рассмотренные методы могут быть распространены на многомерные изображения.
а) |
б) |
Рис. 6. Фрагмент лазерной трассы [4]:
а) видеофрагмент; б) кадры видеофрагмента
Для исследования разработанных методов и алгоритмов обработки изображений лазерных пучков было создано программное обеспечение [12-15]. На рис. 7 представлен интерфейс работающей программы обработки изображений [2,12].
При нажатии кнопки „Analise” в новом окне на экран выводятся вычисленные результаты координат энергетических центров изображений лазерной трассы, в частности, минимальные и максимальные координаты, а также среднее значение координат центра максимальной интенсивности, координаты центра максимальной интенсивности для каждого отдельно взятого изображения, координаты „хороших” изображений, что при процедуре туннелирования попали в туннель.
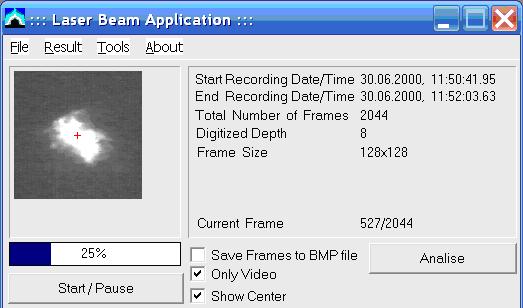
Рис. 7. Разработанная программа обработки изображений лазерных пучков
Рассмотрим этапы для измерения координат энергетических центров лазерных изображений, которые использовались в программной реализации [9,10].
1. Выделение краевых линий.
Начиная от максимальной яркости формируются N ее значений – Tmax-w, w=1,...,N. Крайние точки с яркостью Tmax-w образуют краевую линию. Таким образом, определенно 6 граничных контуров.
2. Определение предварительных центров.
Под координатами точки привязки ![]() мы понимаем координаты энергетического центра изображения
мы понимаем координаты энергетического центра изображения ![]() , что должны зависеть только от сигнала
, что должны зависеть только от сигнала ![]() и инвариантны к функции деформации
и инвариантны к функции деформации ![]() . Координаты
. Координаты ![]() энергетического центра двумерного сигнала с удельной нелинейной плотностью
энергетического центра двумерного сигнала с удельной нелинейной плотностью ![]() , которая отвечает данному значению
, которая отвечает данному значению ![]() , выражаются таким образом:
, выражаются таким образом:
![]()
![]() ,
, ![]() ,
,
где ![]() - моментный признак.
- моментный признак.
3. Сегментация краевых линий.
Для разбивки краевых контуров на несколько частей (сегментация) для определения центральной точки (точки привязки) используются координаты предварительного центра.
Осуществляется сканирование каждого участка краевой линии (сегмента), в полярных координатах, через определенный интервал (реально брали интервал 9°). Избранные точки будут использоваться в качестве данных для аппроксимации (вычисление коэффициентов аппроксимации c2, c3). Для каждого сегмента краевой линии находится сдвиг краевой линии в этом направлении (![]() ,
, ![]() ).
).
4. Аппроксимация краевых линий.
Для каждого сегмента методом наименьших квадратов проводится аппроксимация и находятся коэффициенты аппроксимации.
5. Поиск эталонного изображения.
Для учебной выборки находятся усредненные значения отношения коэффициентов аппроксимации для каждого сегмента (![]() , і – номер сегмента, i=1..4). Для учебной выборки использовалось 50% изображений.
, і – номер сегмента, i=1..4). Для учебной выборки использовалось 50% изображений.
6. Этап туннелирования.
Осуществлялся по усредненным коэффициентам аппроксимации. Границы туннеля определяются из тех изображений, в которых наиболее близко (по минимуму среднеквадратичного отклонения) подходят текущие значения ![]() ,
, ![]() ,
, ![]() ,
, ![]() к эталонным значениям
к эталонным значениям ![]() ,
, ![]() ,
, ![]() ,
, ![]() , слева и справа от них. Потом эти близкосмещенные значения усредняются, и формируются границы туннеля слева и справа.
, слева и справа от них. Потом эти близкосмещенные значения усредняются, и формируются границы туннеля слева и справа.
На рис. 8 внутри пунктирных линий находятся значения, соответствующие![]() ,
, ![]() ,
, ![]() ,
, ![]() для всех изображений, и для них находились усредненные значения
для всех изображений, и для них находились усредненные значения ![]() ,
, ![]() ,
, ![]() ,
, ![]() .. Сплошные линии являются границами туннеля для соответствующих сегментов.
.. Сплошные линии являются границами туннеля для соответствующих сегментов.

Рис. 8. Этап туннелирования
Для повышения информативности данного этапа была разработана компьютерная программа «Специализированной гистограмной модели для процесса туннелирования при идентификации пятенных изображений видео-трассы лазерных пучков» (рис. 9) [16]. Программа позволяет осуществлять анализ результатов измерения координатных характеристик энергетических центров изображений лазерных пучков, с возможностью последующего установления значения так называемого „туннеля” характеристик для идентификации изображений видео-трассы лазерных пучков. Особенностью программы является оригинальное авторское представление визуализации специализированной гистограмной модели отображения необходимых координатных характеристик, которые являются особенно удобными для обработки лазерных трасс большой размерности (больше 10000 изображений) [16].
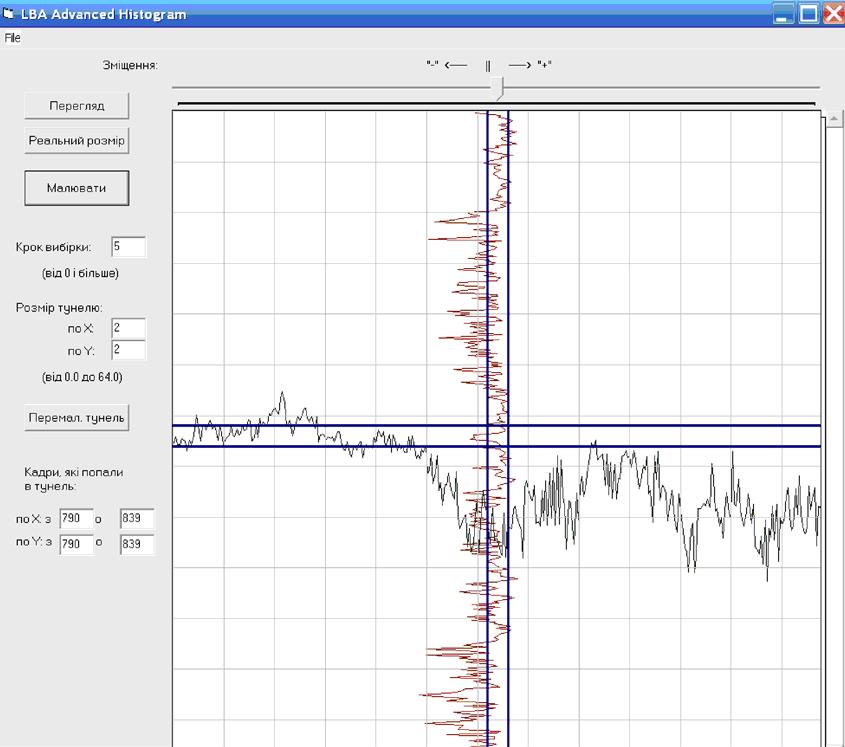
Рис. 9. Разработанная программа специализированной гистограмной модели для процесса туннелирования [16]
7. Этап обучения параллельно-иерархической сети [2,8,9].
Формируется эталонная структура параллельно-иерархической сети для эталонного изображения. Формируется эталонная параллельно-иерархическая сеть для тех изображений, которые формируют определенные границы туннеля слева и справа от центрального туннеля [9,17,18].
8. Этап обработки текущих изображений.
На этом этапе также находится отношения С2/С3 для каждого сегмента (выполняются пункты 1 – 6 алгоритма). В случае попадания С2/С3 в один из туннелей и совпадения параллельно-иерархических сетей для эталонного и текущего изображений, последнее полагают «хорошим», в противоположном случае – «плохим». Если текущее изображение будет «хорошим», то, в соответствии с п. 3 алгоритма, для него вычисляется сдвиг.
9. Оптимизация весов.
Для хорошего изображения проводится оптимизация весовых коэффициентов. Координаты этих центров формируют окончательный результат.
На рис. 10 представлено окно опции „Детальное рассмотрение”, что позволяет пользователю, с помощью опции „Open Frame Image”, загрузить начальное изображение и рассчитать его краевые линии и их центры, с их одновременным отображением на экране с шестью уровнями интенсивности, а также определить координаты энергетического центра изображения.
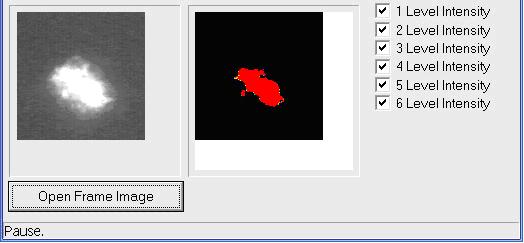
Рис. 10. Окно опции „Детальное рассмотрение”
Сравнительный анализ показывает, что предложенные методы позволяют измерять координаты центра лазерных изображений на основе операций уравновешивания и аппроксимации краевых линий с точностью определения точки привязки не более чем 1,5 пикселя, которые по точности превышают известные методы, например, на основе определения центра веса с помощью моментных признаков, в среднем в 1,5 раза. В проведенных экспериментах были применены 5 лазерных трасс с количеством изображений – 2044 в каждой трассе [2,9-12,17].
Описание методики сжатия и распознавания пятенных изображений
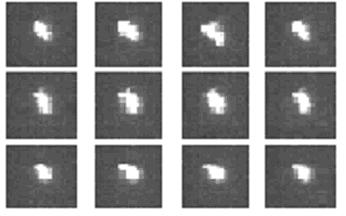
Среди направлений искусственного интеллекта для решения сложных задач распознавания изображений и классификации их по признакам, одними из наиболее эффективных являются нейросетевые технологии [8,19,20]. Первый этап нейросетевого распознавания – это формализация задачи и построение минимального входного вектора, содержащего всю необходимую информацию об объекте распознавания. Входными данными для данной задачи является последовательность кадров динамической протяженной видео-трассы лазерного луча, представленных в виде 8-битных "BMP"-файлов в цветовой модели RGB или Greyscale размерностью 128х128 точек, например, как показано на рис. 11. Без процедуры сжатия для описания одного начального входного изображения заданной размерности необходимо было бы: 128х128х3 = 49152 байт памяти. Выделение такого объема памяти на каждый кадр существенно снижает эффективность обработки при последующей подаче на входы нейросетевой структуры.
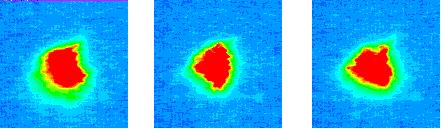
Рис. 11. Примеры входных пятенных изображений
Поэтому была предложена такая последовательность операций над входным пятенным изображением, которую выполняет интеллектуальная система [2,9,19]:
1. Предварительная обработка изображения для дальнейшего распознавания.
1.1 Выделение информативной части изображения ( "Smart Crop").
1.2 Топологический анализ полученной рабочей области (сегментация).
1.3 Усреднение цвета по каждой зоне сегментации.
2. Процедура распознавания.
"Smart Crop" предназначен для выделения пятенного изображения из фоновой части изображения для дальнейшего анализа и предполагает выполнение следующих шагов:
1. Определение центра максимальной интенсивности методом нахождения центра масс изображения [2,9,19].
Использование двумерной ортогональной системы координат позволяет получить следующие выражения для определения каждой координаты:
 ,
,  , (1)
, (1)
где ![]() – абсцисса центра максимальной интенсивности;
– абсцисса центра максимальной интенсивности;
![]() – ордината центра максимальной интенсивности;
– ордината центра максимальной интенсивности;
![]() – абсцисса текущего пикселя с координатами (i;j);
– абсцисса текущего пикселя с координатами (i;j);
![]() – ордината текущего пикселя с координатами (i;j);
– ордината текущего пикселя с координатами (i;j);
![]() – весовой коэффициент текущего пикселя (физический смысл которого - интенсивность, яркость цвета);
– весовой коэффициент текущего пикселя (физический смысл которого - интенсивность, яркость цвета);
![]() – весовой коэффициент фона,
– весовой коэффициент фона, ![]() ;
;
![]() – коэффициент уточнения (выделения) градации яркости.
– коэффициент уточнения (выделения) градации яркости.
Если брать за начало отсчета верхний левый угол изображения, то упомянутые уравнения примут вид:
 ,
,  . (2)
. (2)
Дальнейшая обработка изображения производится с помощью использования определенных компонент модели "CIE XYZ" и "HSV (HSB)" с учетом соответствия их между собой и с моделью "RGB". Для определения интенсивности цвета каждого пикселя и фонового цвета в RGB-изображении необходимо выделить три компоненты "r", "g" и "b", и выполнить линейное преобразование в модель "XYZ" по Y-составляющей.
Для представления цветов в модели RGB в ОС "Windows" используется стандартный 4-байтных тип "COLORREF". Для выделения отдельной компоненты цвета необходимо выполнить побитовое смещение на соответствующее количество разрядов.
![]() ,
, ![]() ,
, ![]() . (3)
. (3)
Размер Y цветовой модели XYZ является относительной яркостью:
![]() . (4)
. (4)
В контексте задачи распознавания пятенных изображений для профилирования лазерных лучей используется компонента Hue (оттенок) цветовой модели "HSV (HSB)", которая соответствует компоненте Y модели "XYZ" и отображает функцию яркости. Так как уровни яркости пятна изображения лазерного пучка представляются цветами спектра, то фактически яркость определяется следующим преобразованием:
![]() ,
, ![]() . (5)
. (5)
При поиске взвешенного центра максимальной интенсивности учитываются все пиксели входного квадратного изображения, поэтому фоновые пиксели имеют влияние на определение центра и дают погрешность в результирующих координатах. Именно поэтому для более точного определения используется коэффициент уточнения (выделения) градации яркости в k-й степени [19].
2. Выделение вписанной в квадрат 128х128 точек окружности максимального радиуса с центром в точке максимальной интенсивности.
Находим максимальный радиус круга с центром в точке максимальной интенсивности, который можно вписать в квадрат размерностью 128х128 пикселей, и выделяем его для дальнейшей обработки по такому выражению:
![]() , (6)
, (6)
где w и h соответственно ширина и высота изображения;
![]() – абсцисса центра максимальной интенсивности;
– абсцисса центра максимальной интенсивности;
![]() – ордината центра максимальной интенсивности.
– ордината центра максимальной интенсивности.
3. Уточнение информативной части изображения путем выделения фонового цвета.
Уточнение происходит путем итеративного сравнения средней интенсивности цвета в кольце, между радиусами ![]() и
и ![]() , с весовым коэффициентом
, с весовым коэффициентом ![]() . На каждой итерации
. На каждой итерации ![]() уменьшается на 1 пиксель, пока не будет найдено кольцо с интенсивностью больше, чем
уменьшается на 1 пиксель, пока не будет найдено кольцо с интенсивностью больше, чем ![]() . Тогда вырезаем пятно с текущим радиусом
. Тогда вырезаем пятно с текущим радиусом ![]() .
.
После применения "Smart Crop" размер рабочего изображения изменяется незначительно, поэтому необходимый объем памяти остается неприемлемым для дальнейшей подачи на входы нейросетевой структуры. Поэтому в данной системе применяется сегментация (топологический анализ) изображения с последующим усреднением интенсивности цвета сегмента. Сегментация является известным методом, который используется для первоначального анализа изображений, но именно "оптимальная" сегментация во многом определяет правильность и эффективность решения задачи. Большинство методов сегментации разработаны для монохромных изображений и обычно адаптация их для работы с цветными изображениями не дает должного результата. Поэтому создание методов сегментации специально для обработки цветных изображений является необходимостью для задач где рассматривается или применяется нейросетевая обработка [19].
После анализа большое количество пятенных изображений одномодовых лазерных трасс (14 трасс по 2044 изображения), области на изображении были классифицированы по влиянию на место расположения энергетического центра и общую оценку "правильности" пятна. Изображение разбивается на 5 колец интенсивности и соответственно на 30 зон (рис. 12). По отношению к радиусу выделенной информативной части изображения радиусы внутренних колец распределены следующим образом:
![]()
Центральная зона наиболее важная и должна охватывать часть изображения с максимальной яркостью. Следующие кольца разделены на разное количество секторов в соответствии со своим номерами: второе кольцо на 22 сектора, третий – на 23, четвертое – на 24. Последнее кольцо не разбивается на зоны, так как оно является граничным между информативной частью изображения и фоном. Периферийные точки в реальных изображениях наиболее сильно подвержены флуктуациям (это справедливо и в отношении периферийных точек уровневых и разрядных срезов изображения), что влияет на форму спектральных линий [2,19]. Поэтому в этой краевой области целесообразно усреднять интенсивность по всему кольцу.

Рис. 12. Схема сегментации пятенного изображения лазерного луча
Для определения номера зоны, в которую попадает обрабатываемый пиксель, сначала будем определять радиус-вектор точки относительно системы координат с центром в точке найденного энергетического центра. Длина радиус-вектора определяет номер зоны-кольца. Далее рассматриваем точку в полярных координатах и находим угол ![]() - между полярной осью и радиус-вектором и приводим его значение в положительную плоскость. Зная номер зоны-кольца и полярный угол
- между полярной осью и радиус-вектором и приводим его значение в положительную плоскость. Зная номер зоны-кольца и полярный угол ![]() , определяем фактический номер зоны. По каждой зоне усредняется интенсивность цвета.
, определяем фактический номер зоны. По каждой зоне усредняется интенсивность цвета.
В результате выполнения всех этапов предварительной обработки получаем изображение в компактном виде, приемлемом для подачи на входы нейросетевой структуры (рис. 13). Для описания пятенного изображения в данном случае требуется 30 байт, так как его определяет 1-байтная действительная величина средней интенсивности каждой из 30 зон.
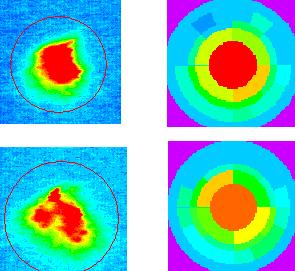
а) б)
Рис. 13. Примеры пятенных изображений:
а) исходные изображения; б) изображение после предварительной обработки
Следовательно, применение интеллектуальной предварительной обработки изображения обеспечивает экономное использование ресурсов памяти компьютерной системы и упрощения структуры НС и соответственно скорость ее работы [2,19]. Также, стоит отметить, что после предварительной обработки сжатое изображение невозможно восстановить до первоначального вида и это свойство в перспективе может быть использовано для защиты информации в системе.
Компьютерное моделирование было выполнено в пакете Statistica Neural Networks 4.0 (SNN) компании StatSoft, который обеспечивает быстрые и эффективные методы нейросетевого моделирования и анализа [21].
В качестве входных данных для нейросетевой модели были выбраны усредненные значения интенсивности цвета по 30 зонам полученные в результате предварительной обработки пятенных изображений. Входные переменные – дробные положительные числа с точностью до 7 знаков после запятой, которые могут принимать значения от 0 до 1.
На рис. 14 приведены результаты распознавания пятенных изображений НС, которая была выбрана для моделирования. Стрелкой обозначены векторы контрольной (верификационной) выборки. Сводные результаты распознавания представлены в таблице 1.
Таблица 1. Общая таблица результатов распознавания смоделированной НС
Тип множества |
Номер элемента |
Распознано верно |
Распознано верно, % |
Распознано неверно |
Не распознано |
Обучающее |
33 |
29 |
96,7 |
1 |
0 |
Контрольное |
34 |
9 |
90 |
1 |
0 |
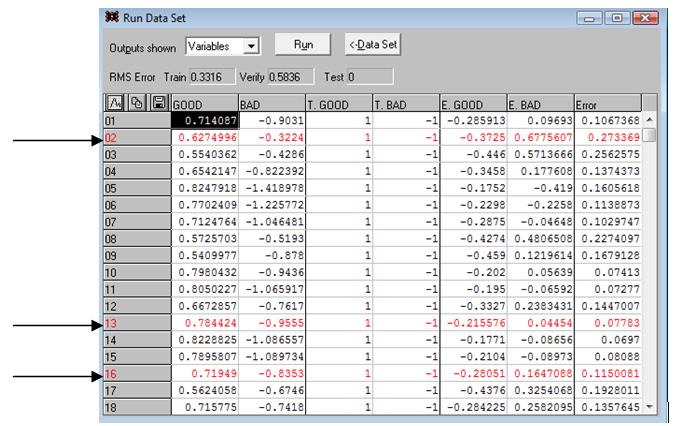
Рис. 14. Экранная форма результатов распознавания изображений сетью, промоделированной в SNN
На основе проведенного компьютерного моделирования разработана интеллектуальная система нейросетевого распознавания и классификации пятенных изображений для предварительной обработки характеристик профиля лазерного луча [22,23], структурно-функциональная схема которой показана на рис. 15, а экранная форма программной реализации на рис. 16.
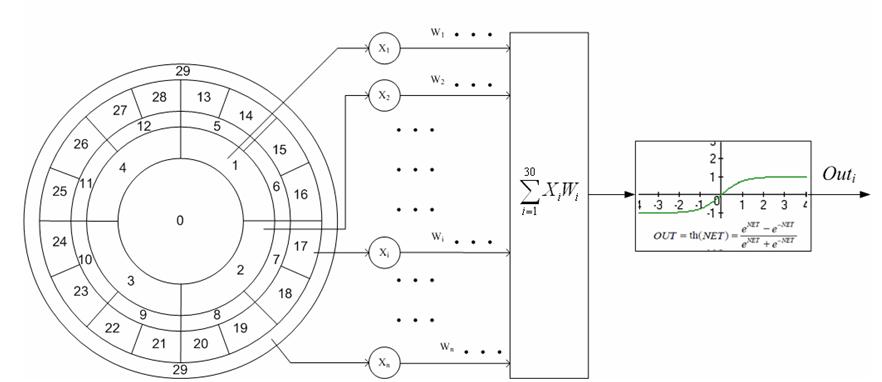
Рис. 15. Структурно-функциональная схема нейросетевого распознавания пятенных изображений
Тестирование ИС по всей длине видео-трассы лазерного луча (2044 пятенных изображения) в реальном времени показало результаты, соответственно: 74% - корректно классифицированных ("хороших") изображений и 60% - "плохих". Результаты тестирования свидетельствуют о работоспособности и адекватности выбранного подхода.
Таблица 2. Результаты нейросетевого распознавания изображений
Параметр |
+ |
- |
Все |
Параметр |
+ |
- |
Все |
Выборка 1 |
20 |
20 |
40 |
Выборка 2 |
100 |
100 |
200 |
Распознано |
19 |
18 |
37 |
Распознано |
92 |
87 |
179 |
В процентах |
95 |
90 |
92,5 |
В процентах |
92 |
87 |
89,5 |
где "+" - класс изображений без существенных искажений (“хорошие”), "-" - класс искаженных изображений (“плохие”), "Все" - всего изображений.

Рис. 16. Экранная форма программной реализации ИС
Описаны результаты исследований использования технологий визуализации для задач профилирования лазерных лучей. Приведены примеры разработанных программных продуктов с функциями визуализации процесса профилирования лазерных лучей. Приведены результаты апробации указанных прикладных программ в задачах идентификации и определения энергетического центра изображений профиля лазерного луча, полученных в результате их математического и компьютерного моделирования.
Результаты работы могут найти широкое применение в разных областях техники для систем, в которых необходимо осуществлять автоматическое корректирование искажений лазерного источника светового излучения. Это системы световой навигации, с использованием лазеров при распространении лазерного излучения в условиях со сниженной видимостью в атмосфере, системы точного ориентирования, с возможностью определять пространственное положение объекта в разных метерологических условиях, лазерные навигационные системы. Это также лазерные системы связи и передачи информации, локации и дальнометрирования, трассирования, навигации и т.п., для которых необходимы количественные данные о влиянии атмосферы на параметры профиля лазерного луча, который несет определенную полезную информацию.
Заканчивая рассмотрение прикладного аспекта визуализации в контексте решения задач профилирования лазерного луча, подведем общие итоги с учетом философско-методологического и научно-прикладного аспектов технологий визуализации. Действительно, именно на примере исследования проблемных вопросов оптических систем и соответственных средств визуализации можно лучше всего проследить отдельные аспекты феномена научной визуализации, которая обеспечивает в значительной мере инвариантность обработки информации. Таким образом, визуализация как информационно-интеллектуальная технология порождает философско-гносеологические и методологические инновации в информационном обществе, информационных технологиях, а также приводит к качественным трансформациям в системе искусственного интеллекта. Представленные методики в решении задач профилирования лазерного луча в достаточной мере иллюстрируют приоритеты для достижения высочайшего уровня обработки информации на современном этапе и указывают на ближайшие перспективы в развитии современных информационных систем.
1. Carlos B. Roundy Current Technology of Laser Beam Profile Measurements. – Spiricon. Inc., 2000.
2. Кожемяко В.П., Тимченко Л.І., Яровой А.А. Методологические подходы к параллельно-иерархической обработке пятенных изображений лазерных пучков и их прикладная реализация // Оптико-электронные информационно-энергетические технологии. - 2006. - №1 (11). - С. 14-25.
3. C.B. Roundy The importance of beam profile. – Physics World, July 1990. – pp. 65-66.
4. Basov N.G., Zemskov E.M., Kutaev Y.F. et. al. Laser Control of Near Earth Space and Possbilities for Removal of Space Debris from Orbit with Explosive Photo-Dissociation Lasers with Phase Conjugation // Proc. GCL/HPL 98. SPIE Symposium. – St-Petersburg (Russia). – 1998. – pp. 219-228.
5. Coherent Inc.: Manufacturer of Lasers: World Leader in Photonics. Mode of access: World Wide Web. URL: http://www.coherent.com.
6. Ф.В.Потёмкин, П.М.Михеев. Измерение пространственных характеристик лазерного пучка. – Труды конференции «Измерения и автоматизация 2006». – М.: МГУ им. М.В.Ломоносова, 2006. – с. 68-73.
7. В. И. Балыкин, В. С. Летохов. Лазерная оптика нейтральных атомных пучков. // Успехи физических наук. – 1990. – Том 160, вып. 1. – с. 141-154.
8. Параллельно-иерархическое преобразование как системная модель оптико-электронных средств искусственного интеллекта. Монография / В.П. Кожемяко, Ю.Ф. Кутаев, С.В. Свечников, Л.И. Тимченко, А.А. Яровой – Винница: Универсум-Винница, 2003. - 324 с.
9. В.П. Кожемяко, Л.И. Тимченко, А.А. Яровой Параллельно-иерархические сети как структурно-функциональный базис для построения специализированных моделей образного компьютера. Монография. - Винница: Универсум-Винница, 2005. - 161 с.
10. L.I. Timchenko, Yu.F. Kutaev, V.P. Kozhemyako, A.A. Yarovyy, A.A. Gertsiy,
A.T. Terenchuk, Nafez Shweiki Method for Training of a Parallel-Hierarchical Network, Based on Population Coding for Processing of Extended Laser Paths Images – Proceedings of SPIE, Volume 4790, 2002. – p. 465-479.
11. V.P. Kozhemyako, L.I. Timchenko, Yu.F. Kutaev, A.A. Gertsiy, A.A. Yarovyy,
N.I. Kokryatskaya, N.P. Grebenyuk, O.A. Poplavskyy Analysis of the methodological approaches in connection with the problem solving of extrapolation of object trajectory – Proceedings of SPIE, Volume 5175, 2003. – p. 222-236.
12. V.P. Kozhemyako, L.I. Timchenko, A.A. Yarovyy Software Support of Accurately Measurement and Prediction of Laser Beam Profile Characteristics. Proceedings of the X International Conference „Swiatіowody i ich zastosowania”, 4-7 October 2006, Krasnobrуd, Poland, Tom 2 – Lublin, Wydawnictwo-Drukarnia Liber Duo s.c., 2006 – p. 675-684.
13. Свидетельство о регистрации авторского права на произведение № 24059. Компьютерная программа для моделирования трехмерного профиля лазерного луча в реальном времени на базе пятенных изображений видео-трасы лазерных пучков („Laser Beam::3D Profiling”) / Яровой А.А., Зарезенко Д.П. Дата регистрации Государственным Департаментом интеллектуальной собственности Украины 24.03.2008.
14. Свидетельство о регистрации авторского права на произведение № 26732. Компьютерная программа динамического 3D моделирование и анализа видео-трасы лазерного луча для профилирования в реальном времени („Laser Beam::3D Video”) / Яровой А.А. Дата регистрации Государственным Департаментом интеллектуальной собственности Украины 01.12.2008.
15. Яровой А.А., Власюк Р.С. Прикладные аспекты реализации интеллектуальной системы распознавания 3D изображений профиля лазерного луча. - Оптоэлектронные информационные технологии «Фотоника ОДС-2010» : Сборник тезисов V Международной научно-технической конференции, г. Винница, 28-30 сентября 2010 года. - Винница: ВНТУ, 2010 – с. 69.
16. Свидетельство о регистрации авторского права на произведение № 26731. Компьютерная программа специализированной гистограммной модели для процесса туннелирования при идентификации пятенных изображений видео-трасы лазерных пучков („Laser Beam Application::Advanced Histogram”) / Яровой А.А. Дата регистрации Государственным Департаментом интеллектуальной собственности Украины 01.12.2008.
17. V.P. Kozhemyako, L.I. Timchenko, A.A. Yarovyy Methodological Principles of Pyramidal and Parallel-Hierarchical Image Processing on the Base of Neural-Like Network Systems // Advances in Electrical and Computer Engineering – “Stefan cel Mare” University of Suceava, Romania – Volume 8 (15), Number 2 (30), 2008, pp. 54-60.
А.А. Яровой Прикладные аспекты программно-аппаратной реализации нейроподобных параллельно-иерархических систем – Научная сессия МИФИ – 2009. ХІ Всероссийская научно-техническая конференция «Нейроинформатика-2009», 27-30 января 2009 г.: Сборник научных трудов. В 2 частях. Ч. 2. – Москва, МИФИ, 2009. – С. 39-48.
18. Яровой А.А., Власюк Р.С. Анализ методики нейросетевого распознавания цветных изображений в контексте ее универсальности // Вестник Национального университета “Львовская политехника”. Информационные системы и сети. - 2009. - №653. - С. 255-262.
19. Саймон Хайкин, Нейронные сети: полный курс, 2-е издание.: Пер.с англ. – М.: Издательский дом "Вильямс", 2006. – 1104 с.
20. StatSoft Russia. STATISTICA Neural Networks. [Електронний ресурс]. – Режим доступу: http://www.statsoft.ru.
21. Свидетельство о регистрации авторского права на произведение № 29085. Компьютерная программа нейросетевого распознавания и классификации пятенных изображений для предыдущей обработки характеристик профиля лазерного луча („Laser Beam::NN Preprocessing”) / Яровой А.А., Власюк Р.С. Дата регистрации Государственным Департаментом интеллектуальной собственности Украины 04.06.2009.
22. Свидетельство о регистрации авторского права на произведение № 34386. Компьютерная программа „Программный модуль предыдущей обработки входных данных и визуализации результатов нейросетевого прогнозирования координат энергетических центров профиля лазерного луча („Laser Beam::Prediction-P&V”)” / Яровой А.А., Власюк Р.С. Дата регистрации Государственным Департаментом интеллектуальной собственности Украины 04.08.2010.
23. Р.В. Бойко, В.А. Комаров, В.Г. Красиленко Быстродейсвующий метод вычисления моментных признаков при обработке изображений – Автометрия, №6, Издательство "Наука", 1989. – С. 16-22. - http://scholar.google.com/scholar_host?q=info:dE164MTMUa0J:scholar.google.com/&output=viewport&pg=16